Depth API membantu kamera perangkat memahami ukuran dan bentuk objek nyata dalam adegan. Mode ini menggunakan kamera untuk membuat gambar kedalaman, atau peta kedalaman, sehingga menambahkan lapisan realisme AR ke aplikasi Anda. Anda dapat menggunakan informasi yang diberikan oleh gambar kedalaman untuk membuat objek virtual muncul secara akurat di depan atau di belakang objek dunia nyata, sehingga memungkinkan pengalaman pengguna yang imersif dan realistis.
Informasi kedalaman dihitung dari gerakan dan dapat digabungkan dengan informasi dari sensor kedalaman hardware, seperti sensor waktu terbang (ToF), jika tersedia. Perangkat tidak memerlukan sensor ToF untuk mendukung Depth API.
Prasyarat
Pastikan Anda memahami konsep dasar AR dan cara mengonfigurasi sesi ARCore sebelum melanjutkan.
Batasi akses ke perangkat yang didukung Depth
Jika aplikasi Anda memerlukan dukungan Depth API, baik karena bagian inti dari
Pengalaman AR bergantung pada kedalaman, atau karena tidak ada penggantian yang halus untuk
bagian aplikasi yang menggunakan kedalaman, Anda dapat memilih untuk membatasi distribusi
di Google Play Store untuk
perangkat yang mendukung Depth API dengan menambahkan
baris berikut ke AndroidManifest.xml Anda, selain baris
AndroidManifest.xml perubahan dijelaskan dalam
Panduan Enable ARCore:
<uses-feature android:name="com.google.ar.core.depth" />
Aktifkan Kedalaman
Dalam sesi ARCore baru, periksa apakah perangkat pengguna mendukung Kedalaman. Tidak semua perangkat yang kompatibel dengan ARCore mendukung Depth API karena kendala daya pemrosesan. Untuk menghemat resource, kedalaman dinonaktifkan secara default di ARCore. Aktifkan mode kedalaman agar aplikasi Anda menggunakan Depth API.
Java
Config config = session.getConfig(); // Check whether the user's device supports the Depth API. boolean isDepthSupported = session.isDepthModeSupported(Config.DepthMode.AUTOMATIC); if (isDepthSupported) { config.setDepthMode(Config.DepthMode.AUTOMATIC); } session.configure(config);
Kotlin
val config = session.config // Check whether the user's device supports the Depth API. val isDepthSupported = session.isDepthModeSupported(Config.DepthMode.AUTOMATIC) if (isDepthSupported) { config.depthMode = Config.DepthMode.AUTOMATIC } session.configure(config)
Mendapatkan gambar kedalaman
Panggil Frame.acquireDepthImage16Bits() guna mendapatkan gambar kedalaman untuk frame saat ini.
Java
// Retrieve the depth image for the current frame, if available. Image depthImage = null; try { depthImage = frame.acquireDepthImage16Bits(); // Use the depth image here. } catch (NotYetAvailableException e) { // This means that depth data is not available yet. // Depth data will not be available if there are no tracked // feature points. This can happen when there is no motion, or when the // camera loses its ability to track objects in the surrounding // environment. } finally { if (depthImage != null) { depthImage.close(); } }
Kotlin
// Retrieve the depth image for the current frame, if available. try { frame.acquireDepthImage16Bits().use { depthImage -> // Use the depth image here. } } catch (e: NotYetAvailableException) { // This means that depth data is not available yet. // Depth data will not be available if there are no tracked // feature points. This can happen when there is no motion, or when the // camera loses its ability to track objects in the surrounding // environment. }
Gambar yang ditampilkan menyediakan buffer gambar mentah, yang dapat diteruskan ke shader fragmen untuk digunakan di GPU agar setiap objek yang dirender dapat dioklusi. Class ini berorientasi pada OPENGL_NORMALIZED_DEVICE_COORDINATES dan dapat diubah menjadi TEXTURE_NORMALIZED dengan memanggil Frame.transformCoordinates2d(). Setelah gambar kedalaman dapat diakses dalam shader objek, pengukuran kedalaman ini dapat diakses langsung untuk penanganan oklusi.
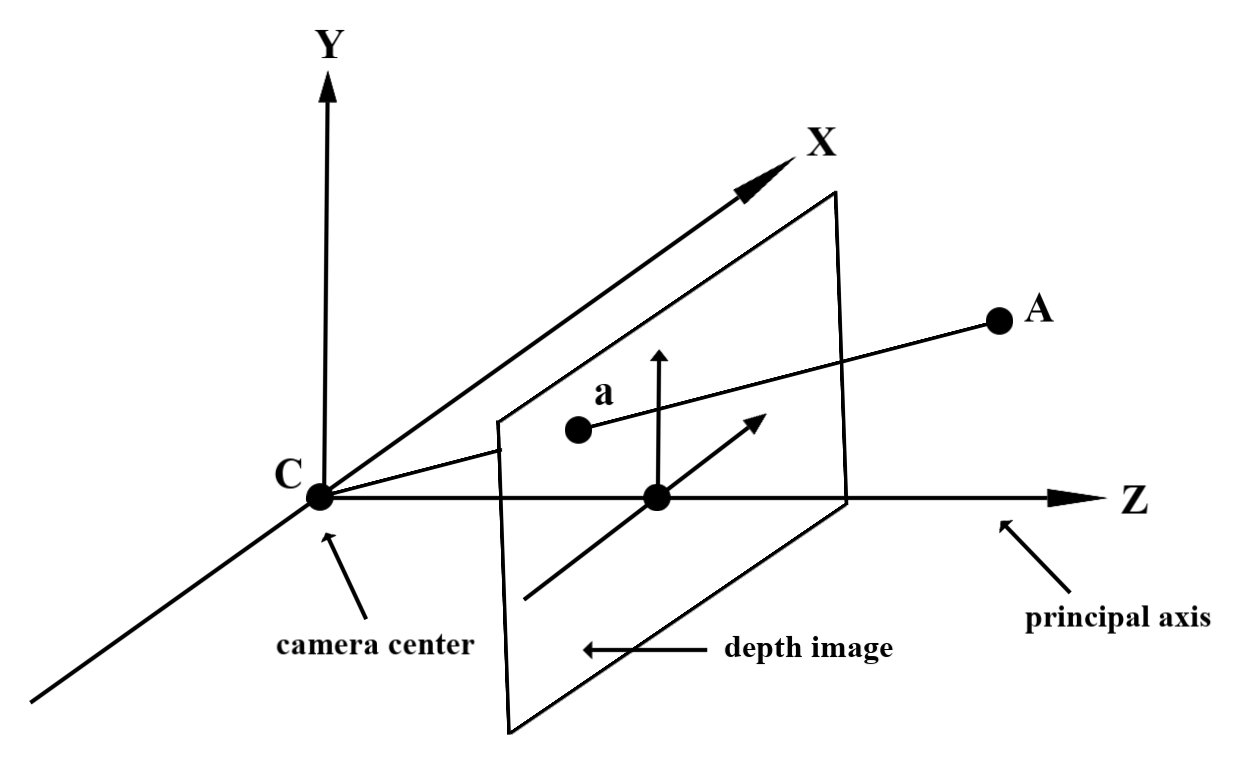
Memahami nilai kedalaman
Titik yang diberikan A pada geometri dunia nyata yang diamati dan titik 2D a
merepresentasikan titik yang sama pada gambar depth, nilai yang diberikan oleh Depth
API pada a sama dengan panjang CA yang diproyeksikan pada sumbu utama.
Ini juga dapat disebut sebagai koordinat z dari A relatif terhadap kamera
C asal. Saat menggunakan Depth API, penting untuk memahami bahwa
nilai kedalaman bukanlah panjang sinar CA itu sendiri, melainkan proyeksi
data tersebut.
Menggunakan kedalaman dalam shader
Mengurai informasi kedalaman untuk frame saat ini
Gunakan fungsi bantuan DepthGetMillimeters() dan DepthGetVisibility() dalam shader fragmen untuk mengakses informasi kedalaman posisi layar saat ini. Kemudian gunakan informasi ini untuk menutupi bagian objek yang dirender secara selektif.
// Use DepthGetMillimeters() and DepthGetVisibility() to parse the depth image
// for a given pixel, and compare against the depth of the object to render.
float DepthGetMillimeters(in sampler2D depth_texture, in vec2 depth_uv) {
// Depth is packed into the red and green components of its texture.
// The texture is a normalized format, storing millimeters.
vec3 packedDepthAndVisibility = texture2D(depth_texture, depth_uv).xyz;
return dot(packedDepthAndVisibility.xy, vec2(255.0, 256.0 * 255.0));
}
// Return a value representing how visible or occluded a pixel is relative
// to the depth image. The range is 0.0 (not visible) to 1.0 (completely
// visible).
float DepthGetVisibility(in sampler2D depth_texture, in vec2 depth_uv,
in float asset_depth_mm) {
float depth_mm = DepthGetMillimeters(depth_texture, depth_uv);
// Instead of a hard Z-buffer test, allow the asset to fade into the
// background along a 2 * kDepthTolerancePerMm * asset_depth_mm
// range centered on the background depth.
const float kDepthTolerancePerMm = 0.015f;
float visibility_occlusion = clamp(0.5 * (depth_mm - asset_depth_mm) /
(kDepthTolerancePerMm * asset_depth_mm) + 0.5, 0.0, 1.0);
// Use visibility_depth_near to set the minimum depth value. If using
// this value for occlusion, avoid setting it too close to zero. A depth value
// of zero signifies that there is no depth data to be found.
float visibility_depth_near = 1.0 - InverseLerp(
depth_mm, /*min_depth_mm=*/150.0, /*max_depth_mm=*/200.0);
// Use visibility_depth_far to set the maximum depth value. If the depth
// value is too high (outside the range specified by visibility_depth_far),
// the virtual object may get inaccurately occluded at further distances
// due to too much noise.
float visibility_depth_far = InverseLerp(
depth_mm, /*min_depth_mm=*/7500.0, /*max_depth_mm=*/8000.0);
const float kOcclusionAlpha = 0.0f;
float visibility =
max(max(visibility_occlusion, kOcclusionAlpha),
max(visibility_depth_near, visibility_depth_far));
return visibility;
}
Menghalangi objek virtual
Menghalangi objek virtual dalam isi shader fragmen. Update saluran alfa objek berdasarkan kedalamannya. Tindakan ini akan merender objek yang terhalang.
// Occlude virtual objects by updating the object’s alpha channel based on its depth.
const float kMetersToMillimeters = 1000.0;
float asset_depth_mm = v_ViewPosition.z * kMetersToMillimeters * -1.;
// Compute the texture coordinates to sample from the depth image.
vec2 depth_uvs = (u_DepthUvTransform * vec3(v_ScreenSpacePosition.xy, 1)).xy;
gl_FragColor.a *= DepthGetVisibility(u_DepthTexture, depth_uvs, asset_depth_mm);
Anda bisa merender oklusi menggunakan rendering dua-pass atau rendering maju-pass per-objek. Efisiensi setiap pendekatan bergantung pada kompleksitas adegan dan pertimbangan khusus aplikasi lainnya.
Per-objek, {i>forward-pass rendering<i}
Per-objek, rendering pass-pass menentukan oklusi setiap piksel objek dalam shader materialnya. Jika piksel tidak terlihat, piksel tersebut akan dipotong, biasanya melalui pencampuran alfa, sehingga menyimulasikan oklusi di perangkat pengguna.
Rendering dua tahap
Dengan rendering dua tahap, penerusan pertama merender semua konten virtual ke dalam buffer perantara. Pass kedua menggabungkan adegan virtual ke latar belakang berdasarkan perbedaan antara kedalaman dunia nyata dengan kedalaman adegan virtual. Pendekatan ini tidak memerlukan pekerjaan shader spesifik per objek tambahan dan umumnya memberikan hasil yang terlihat lebih seragam dibandingkan metode {i>forward-pass<i}.
Mengekstrak jarak dari gambar kedalaman
Agar dapat menggunakan Depth API untuk tujuan selain menutupi objek virtual atau memvisualisasikan data kedalaman, ekstrak informasi dari gambar kedalaman.
Java
/** Obtain the depth in millimeters for depthImage at coordinates (x, y). */ public int getMillimetersDepth(Image depthImage, int x, int y) { // The depth image has a single plane, which stores depth for each // pixel as 16-bit unsigned integers. Image.Plane plane = depthImage.getPlanes()[0]; int byteIndex = x * plane.getPixelStride() + y * plane.getRowStride(); ByteBuffer buffer = plane.getBuffer().order(ByteOrder.nativeOrder()); return Short.toUnsignedInt(buffer.getShort(byteIndex)); }
Kotlin
/** Obtain the depth in millimeters for [depthImage] at coordinates ([x], [y]). */ fun getMillimetersDepth(depthImage: Image, x: Int, y: Int): UInt { // The depth image has a single plane, which stores depth for each // pixel as 16-bit unsigned integers. val plane = depthImage.planes[0] val byteIndex = x * plane.pixelStride + y * plane.rowStride val buffer = plane.buffer.order(ByteOrder.nativeOrder()) val depthSample = buffer.getShort(byteIndex) return depthSample.toUInt() }
Mengonversi koordinat antara gambar kamera dan gambar kedalaman
Gambar yang diperoleh menggunakan getCameraImage() mungkin memiliki rasio aspek yang berbeda dibandingkan dengan gambar kedalaman.
Dalam hal ini, gambar kedalaman adalah pemangkasan gambar kamera, dan tidak semua piksel dalam gambar kamera memiliki perkiraan kedalaman yang valid.
Untuk memperoleh koordinat kedalaman gambar pada koordinat gambar CPU:
Java
float[] cpuCoordinates = new float[] {cpuCoordinateX, cpuCoordinateY}; float[] textureCoordinates = new float[2]; frame.transformCoordinates2d( Coordinates2d.IMAGE_PIXELS, cpuCoordinates, Coordinates2d.TEXTURE_NORMALIZED, textureCoordinates); if (textureCoordinates[0] < 0 || textureCoordinates[1] < 0) { // There are no valid depth coordinates, because the coordinates in the CPU image are in the // cropped area of the depth image. return null; } return new Pair<>( (int) (textureCoordinates[0] * depthImage.getWidth()), (int) (textureCoordinates[1] * depthImage.getHeight()));
Kotlin
val cpuCoordinates = floatArrayOf(cpuCoordinateX.toFloat(), cpuCoordinateY.toFloat()) val textureCoordinates = FloatArray(2) frame.transformCoordinates2d( Coordinates2d.IMAGE_PIXELS, cpuCoordinates, Coordinates2d.TEXTURE_NORMALIZED, textureCoordinates, ) if (textureCoordinates[0] < 0 || textureCoordinates[1] < 0) { // There are no valid depth coordinates, because the coordinates in the CPU image are in the // cropped area of the depth image. return null } return (textureCoordinates[0] * depthImage.width).toInt() to (textureCoordinates[1] * depthImage.height).toInt()
Untuk memperoleh koordinat gambar CPU untuk koordinat kedalaman gambar:
Java
float[] textureCoordinates = new float[] { (float) depthCoordinateX / (float) depthImage.getWidth(), (float) depthCoordinateY / (float) depthImage.getHeight() }; float[] cpuCoordinates = new float[2]; frame.transformCoordinates2d( Coordinates2d.TEXTURE_NORMALIZED, textureCoordinates, Coordinates2d.IMAGE_PIXELS, cpuCoordinates); return new Pair<>((int) cpuCoordinates[0], (int) cpuCoordinates[1]);
Kotlin
val textureCoordinates = floatArrayOf( depthCoordinatesX.toFloat() / depthImage.width.toFloat(), depthCoordinatesY.toFloat() / depthImage.height.toFloat(), ) val cpuCoordinates = FloatArray(2) frame.transformCoordinates2d( Coordinates2d.TEXTURE_NORMALIZED, textureCoordinates, Coordinates2d.IMAGE_PIXELS, cpuCoordinates, ) return cpuCoordinates[0].toInt() to cpuCoordinates[1].toInt()
Hit-test kedalaman
Hit-test memungkinkan pengguna menempatkan objek di lokasi dunia nyata pada scene. Sebelumnya, hit-test hanya dapat dilakukan pada bidang yang terdeteksi, sehingga membatasi lokasi ke permukaan yang besar dan datar, seperti hasil yang ditunjukkan oleh Android hijau. Hit-test depth memanfaatkan informasi kedalaman yang halus dan mentah untuk memberikan hasil hit yang lebih akurat, bahkan pada permukaan non-planar dan bertekstur rendah. Hal ini ditampilkan dengan Android berwarna merah.
Untuk menggunakan hit test yang mendukung kedalaman, panggil hitTest() dan periksa DepthPoints dalam daftar nilai yang ditampilkan.
Java
// Create a hit test using the Depth API. List<HitResult> hitResultList = frame.hitTest(tap); for (HitResult hit : hitResultList) { Trackable trackable = hit.getTrackable(); if (trackable instanceof Plane || trackable instanceof Point || trackable instanceof DepthPoint) { useHitResult(hit); break; } }
Kotlin
// Create a hit test using the Depth API. val hitResult = frame .hitTest(tap) .filter { val trackable = it.trackable trackable is Plane || trackable is Point || trackable is DepthPoint } .firstOrNull() useHitResult(hitResult)
Langkah selanjutnya
- Aktifkan deteksi yang lebih akurat dengan Raw Depth API.
- Lihat ARCore Depth Lab, yang menunjukkan berbagai cara untuk mengakses data kedalaman.