Scene Semantics API'yi kendi uygulamalarınızda nasıl kullanacağınızı öğrenin.
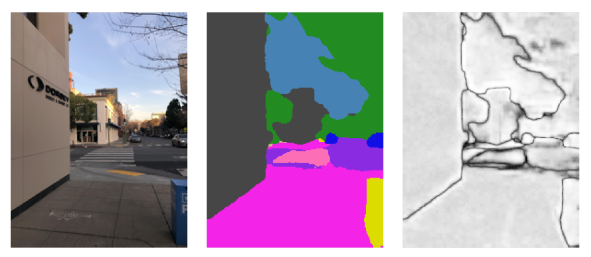
Scene Semantics API, makine öğrenimi modeline dayalı, gerçek zamanlı semantik bilgiler sağlayarak geliştiricilerin kullanıcıyı çevreleyen ortamı anlamalarını sağlar. Bir dış mekan sahnesinin resmi dikkate alındığında API, gökyüzü, bina, ağaç, yol, kaldırım, araç, kişi ve diğer yararlı anlamsal sınıflarda her piksel için bir etiket döndürür. Scene Semantics API, piksel etiketlerine ek olarak her piksel etiketi için güven değerleri ve belirli bir etiketin dış mekan sahnesindeki yaygınlığını sorgulamak için kolay bir yol sunar.
Soldan sağa, bir giriş resmi örnekleri, piksel etiketlerinin anlamsal resmi ve ilgili güven resmi:
Ön koşullar
Temel artırılmış gerçeklik kavramlarını anladığınızdan emin olun ve devam etmeden önce ARCore oturumunun nasıl yapılandırılacağı hakkında daha fazla bilgi edinin.
Sahne Anlamını Etkinleştir
Yeni bir ARCore oturumunda, kullanıcının cihazının Scene Semantics API'yi destekleyip desteklemediğini kontrol edin. İşlem gücü kısıtlamaları nedeniyle ARCore uyumlu cihazların tümü Scene Semantics API'yi desteklemez.
Kaynakları kaydetmek için ARCore'da Sahne Semantiği varsayılan olarak devre dışıdır. Uygulamanızın Scene Semantics API'yi kullanmasını sağlamak için semantik modunu etkinleştirin.
GARSessionConfiguration *configuration = [[GARSessionConfiguration alloc] init];
if ([self.garSession isSemanticModeSupported:GARSemanticModeEnabled]) {
configuration.semanticMode = GARSemanticModeEnabled;
}
NSError *error;
[self.garSession setConfiguration:configuration error:&error];
Anlamsal görüntü edinme
Sahne Semantiği etkinleştirildiğinde anlamsal resim alınabilir. Anlamsal resim, her pikselin GARSemanticLabel ile tanımlanan anlamsal bir etikete karşılık geldiği bir kCVPixelFormatType_OneComponent8 resmidir.
Anlamsal resmi edinmek için GARFrame.semanticImage simgesini kullanın:
CVPixelBuffer semanticImage = garFrame.semanticImage;
if (semanticImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Çıkış anlamsal görüntüleri, cihaza bağlı olarak oturumun başlangıcından itibaren yaklaşık 1-3 kare sonra kullanılabilir olmalıdır.
Güven resmini elde etme
Her piksel için etiket sağlayan anlamsal resme ek olarak API, karşılık gelen piksel güven değerlerinin bir güven resmi de sağlar. Güven resmi, her pikselin [0, 255] aralığındaki bir değere karşılık geldiği ve her pikselin anlamsal etiketiyle ilişkili olasılığa karşılık gelen bir kCVPixelFormatType_OneComponent8 resmidir.
Anlamsal güven görüntüsünü elde etmek için GARFrame.semanticConfidenceImage işlevini kullanın:
CVPixelBuffer confidenceImage = garFrame.semanticConfidenceImage;
if (confidenceImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Çıkış güven resimleri, cihaza bağlı olarak oturumun başlangıcından itibaren yaklaşık 1-3 kare sonra kullanılabilir olmalıdır.
Anlamsal etiket için piksellerin oranını sorgulama
Geçerli çerçevede bulunan ve gökyüzü gibi belirli bir sınıfa ait piksellerin oranını da sorgulayabilirsiniz. Bu sorgu, anlamsal resmi döndürüp belirli bir etiket için piksel düzeyinde arama yapmaktan daha etkilidir. Döndürülen kesir, [0.0, 1.0] aralığında bir kayan noktalı değerdir.
Belirli bir etiketin kesirini öğrenmek için fractionForSemanticLabel: işlevini kullanın:
// Ensure that semantic data is present for the GARFrame.
if (garFrame.semanticImage) {
float fraction = [garFrame fractionForSemanticLabel:GARSemanticLabelSky];
}