 Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Conceitos de detecção de malha de rosto
Mantenha tudo organizado com as coleções
Salve e categorize o conteúdo com base nas suas preferências.
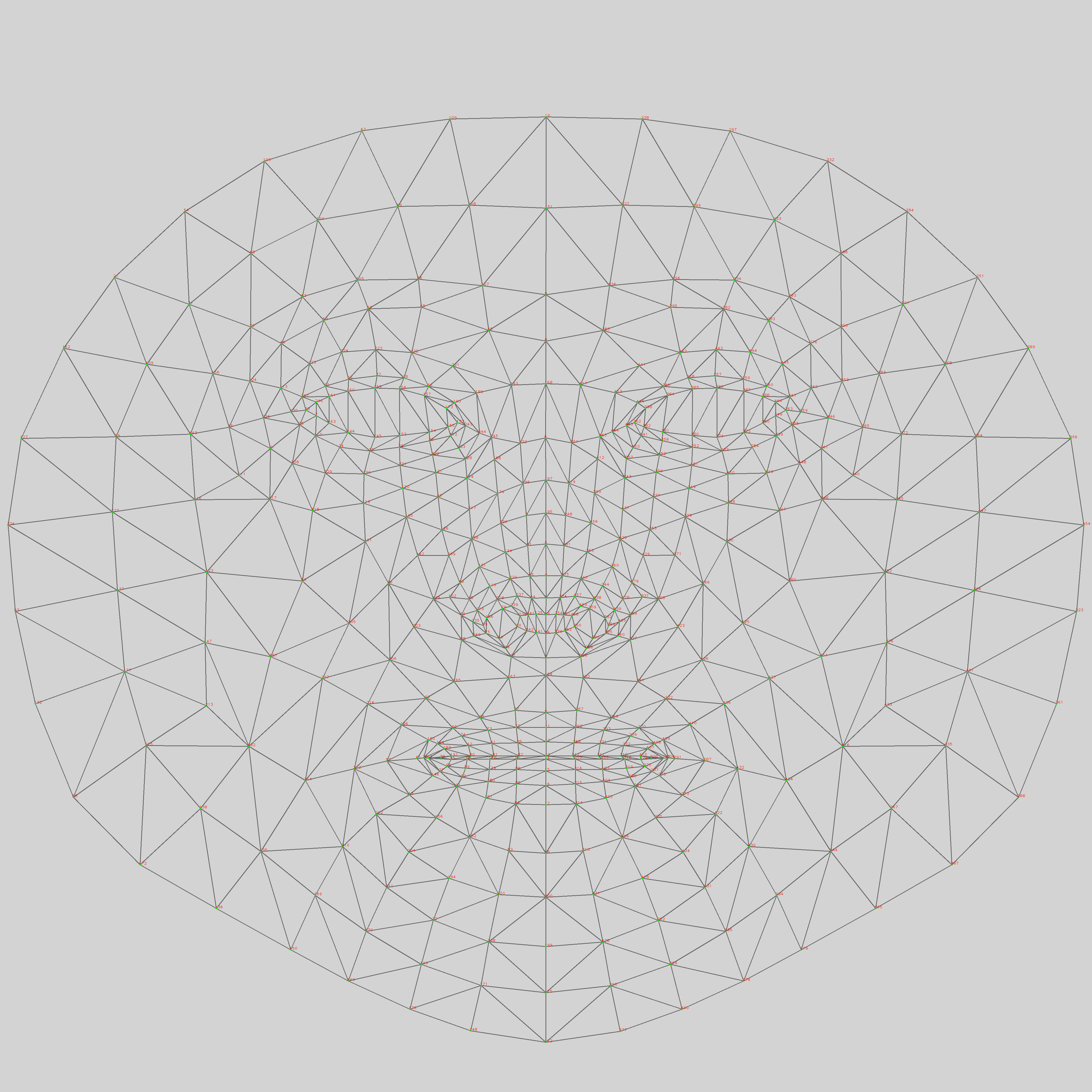
As informações da malha de rosto contêm duas partes:
468 pontos 3D:cada ponto tem um ID exclusivo, variando de 0 a 467,
associado a uma posição fixa no rosto detectado. Para cada ponto:
- x e y são coordenadas em pixels do rosto detectado.
- Z é a informação de profundidade dimensionada para o tamanho da imagem, de modo que os valores Z sejam mais negativos quando o rosto está mais perto da câmera. A origem é a profundidade média
de todos os 468 pontos.
Informações de triângulo:é usada para representar uma superfície lógica de triângulo na face detectada. Cada triângulo contém três pontos 3D. Por exemplo, os pontos
no 0, 37 e 164 construem uma pequena área triangular entre o nariz e os lábios.
Exceto em caso de indicação contrária, o conteúdo desta página é licenciado de acordo com a Licença de atribuição 4.0 do Creative Commons, e as amostras de código são licenciadas de acordo com a Licença Apache 2.0. Para mais detalhes, consulte as políticas do site do Google Developers. Java é uma marca registrada da Oracle e/ou afiliadas.
Última atualização 2026-06-19 UTC.
[[["Fácil de entender","easyToUnderstand","thumb-up"],["Meu problema foi resolvido","solvedMyProblem","thumb-up"],["Outro","otherUp","thumb-up"]],[["Não contém as informações de que eu preciso","missingTheInformationINeed","thumb-down"],["Muito complicado / etapas demais","tooComplicatedTooManySteps","thumb-down"],["Desatualizado","outOfDate","thumb-down"],["Problema na tradução","translationIssue","thumb-down"],["Problema com as amostras / o código","samplesCodeIssue","thumb-down"],["Outro","otherDown","thumb-down"]],["Última atualização 2026-06-19 UTC."],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]