 Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Concetti del rilevamento del mesh di volti
Mantieni tutto organizzato con le raccolte
Salva e classifica i contenuti in base alle tue preferenze.
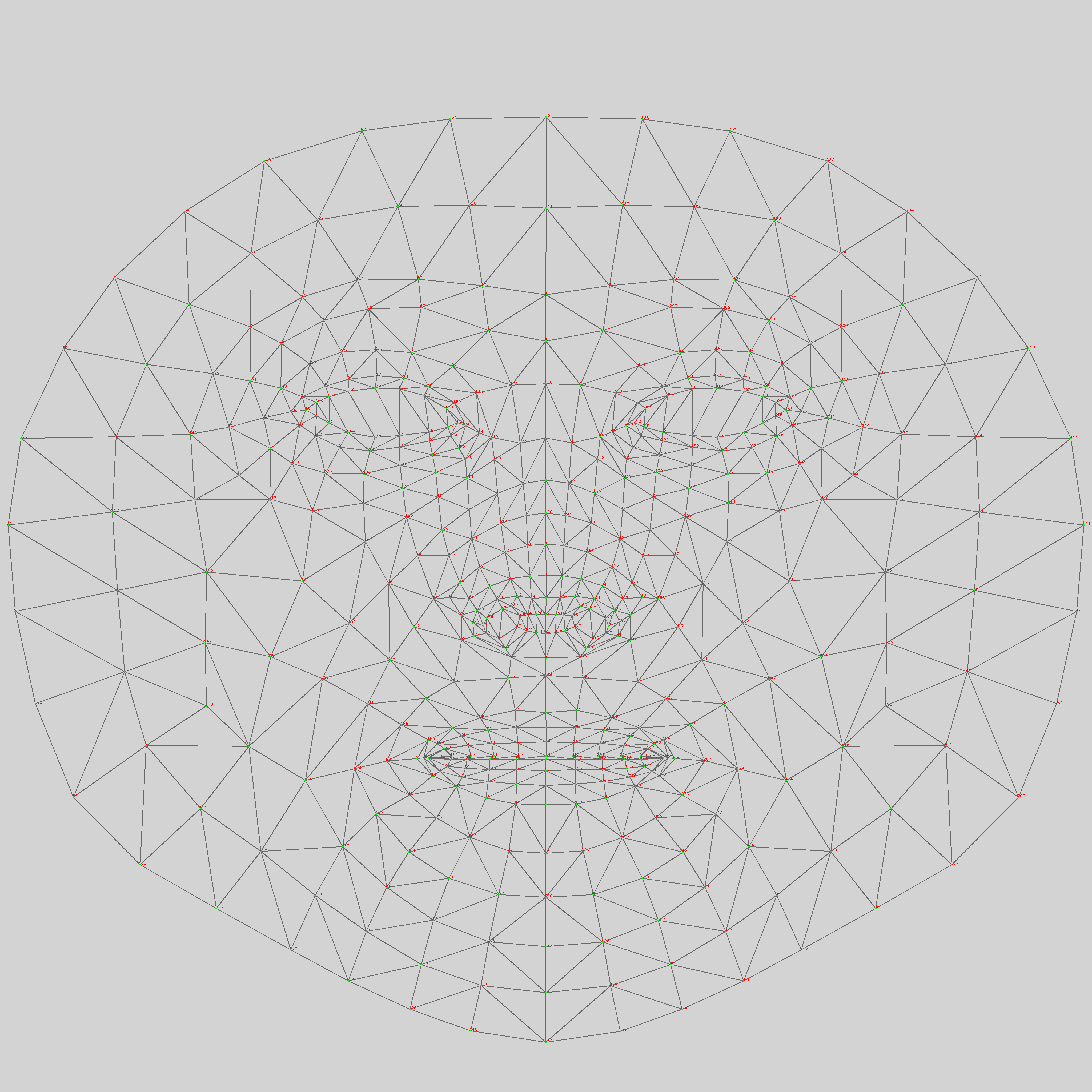
Le informazioni del mesh di volti includono due parti:
468 punti 3D: ogni punto ha un ID univoco, compreso tra 0 e 467,
associato a una posizione fissa sul volto rilevato. Per ogni punto:
- x e y sono le coordinate in pixel del volto rilevato.
- z è la profondità contenente le dimensioni dell'immagine, in modo che i valori z siano più negativi quando il volto è più vicino alla fotocamera. L'origine è la profondità media di tutti i 468 punti.
Informazioni sul triangolo: vengono utilizzate per rappresentare una superficie logica a forma di triangolo nella faccia rilevata. Ogni triangolo contiene tre punti 3D. Ad esempio, i punti
00, 37 e 164 creano una piccola area triangolare tra naso e labbra.
Salvo quando diversamente specificato, i contenuti di questa pagina sono concessi in base alla licenza Creative Commons Attribution 4.0, mentre gli esempi di codice sono concessi in base alla licenza Apache 2.0. Per ulteriori dettagli, consulta le norme del sito di Google Developers. Java è un marchio registrato di Oracle e/o delle sue consociate.
Ultimo aggiornamento 2026-06-28 UTC.
[[["Facile da capire","easyToUnderstand","thumb-up"],["Il problema è stato risolto","solvedMyProblem","thumb-up"],["Altra","otherUp","thumb-up"]],[["Mancano le informazioni di cui ho bisogno","missingTheInformationINeed","thumb-down"],["Troppo complicato/troppi passaggi","tooComplicatedTooManySteps","thumb-down"],["Obsoleti","outOfDate","thumb-down"],["Problema di traduzione","translationIssue","thumb-down"],["Problema relativo a esempi/codice","samplesCodeIssue","thumb-down"],["Altra","otherDown","thumb-down"]],["Ultimo aggiornamento 2026-06-28 UTC."],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]