 Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Google uses AI technology to translate content into your preferred language. AI translations can contain errors.
Conceptos de detección de malla facial
Organiza tus páginas con colecciones
Guarda y categoriza el contenido según tus preferencias.
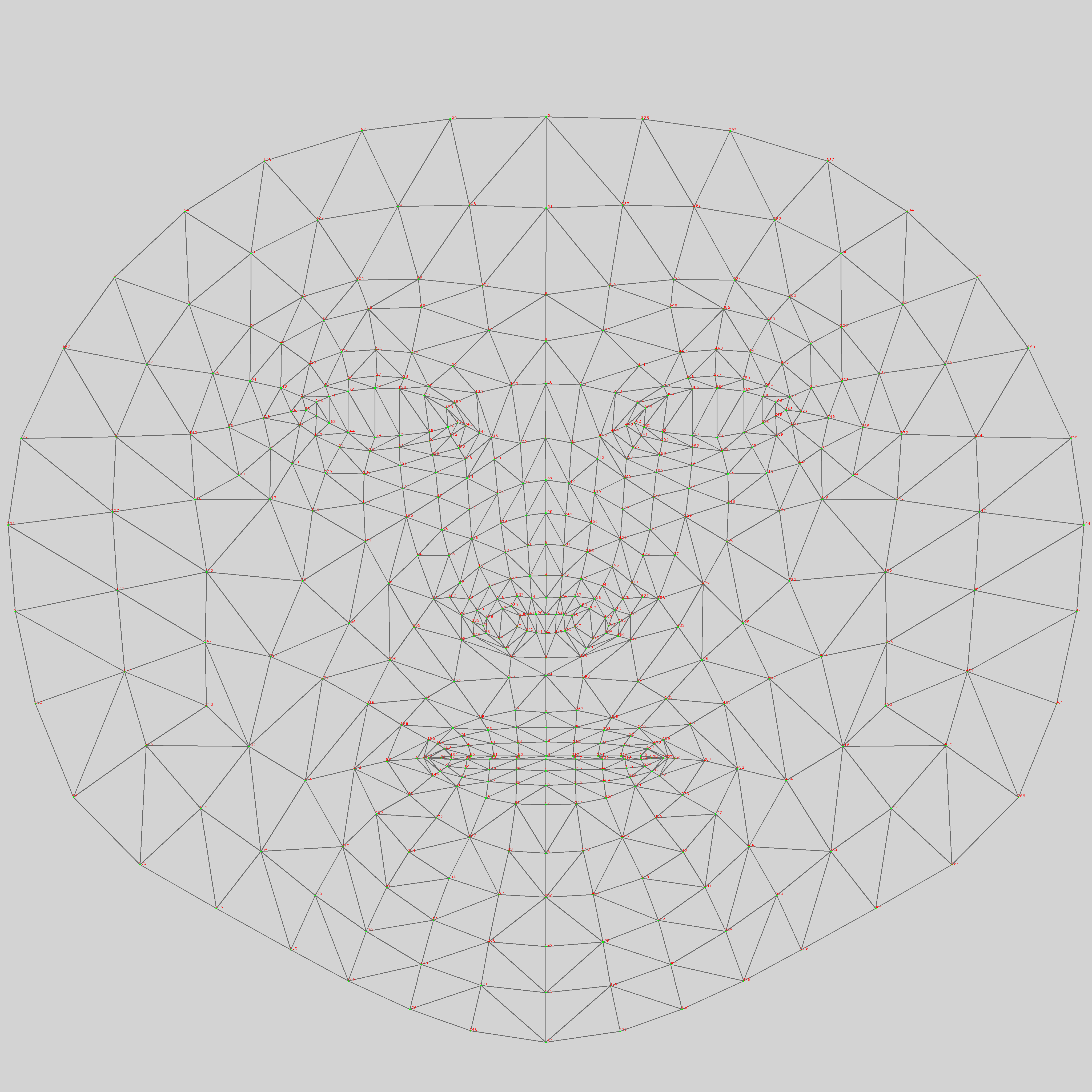
La información de la malla de rostros contiene dos partes:
468 puntos 3D: Cada punto tiene un ID único que varía de 0 a 467, asociado con una posición fija en el rostro detectado. Para cada punto:
- x e y son coordenadas de píxeles del rostro detectado.
- z es la información de profundidad escalada al tamaño de la imagen, de modo que los valores z son más negativos cuando el rostro está más cerca de la cámara. El origen es la profundidad
promedio de los 468 puntos.
Información del triángulo: Se usa para representar una superficie triangular lógica en el rostro detectado. Cada triángulo contiene tres puntos 3D. Por ejemplo, los puntos n.o 0, n.o 37 y n.o 164 construyen un área triangular pequeña entre la nariz y los labios.
Salvo que se indique lo contrario, el contenido de esta página está sujeto a la licencia Atribución 4.0 de Creative Commons, y los ejemplos de código están sujetos a la licencia Apache 2.0. Para obtener más información, consulta las políticas del sitio de Google Developers. Java es una marca registrada de Oracle o sus afiliados.
Última actualización: 2026-06-28 (UTC)
[[["Fácil de comprender","easyToUnderstand","thumb-up"],["Resolvió mi problema","solvedMyProblem","thumb-up"],["Otro","otherUp","thumb-up"]],[["Falta la información que necesito","missingTheInformationINeed","thumb-down"],["Muy complicado o demasiados pasos","tooComplicatedTooManySteps","thumb-down"],["Desactualizado","outOfDate","thumb-down"],["Problema de traducción","translationIssue","thumb-down"],["Problema con las muestras o los códigos","samplesCodeIssue","thumb-down"],["Otro","otherDown","thumb-down"]],["Última actualización: 2026-06-28 (UTC)"],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]