
এই বিভাগে বর্ণনা করা হয়েছে কিভাবে আপনি অ্যান্ড্রয়েড ফর কারস অ্যাপ লাইব্রেরির সাথে নেভিগেশন এসডিকে ব্যবহার করে আপনার অ্যাপের নেভিগেশন অভিজ্ঞতা ইন-ড্যাশ হেড ইউনিটে প্রদর্শন করতে পারেন। যদি কোনো ব্যবহারকারীর ইন-ড্যাশ সিস্টেম অ্যান্ড্রয়েড অটো সমর্থন করে, তবে ব্যবহারকারীরা তাদের ফোনটি ইউনিটের সাথে সংযুক্ত করে সরাসরি তাদের গাড়ির ডিসপ্লেতে আপনার অ্যাপটি ব্যবহার করতে পারবেন। ভয়েস গাইডেন্সও গাড়ির স্পিকারের মাধ্যমে চলে।

অ্যান্ড্রয়েড ফর কারস অ্যাপ লাইব্রেরি চালকের নিরাপত্তার জন্য অনুমোদিত এক সেট ভিজ্যুয়াল টেমপ্লেট প্রদানের মাধ্যমে অ্যান্ড্রয়েড অ্যাপ্লিকেশনগুলোকে অ্যান্ড্রয়েড অটোতে চালাতে সক্ষম করে। এই টেমপ্লেটগুলো চালকের মনোযোগের বিচ্যুতি কমানোর উদ্দেশ্যে ড্যাশবোর্ডের UI কন্ট্রোলগুলোকে ফোনের কন্ট্রোল থেকে ইচ্ছাকৃতভাবে সীমাবদ্ধ রাখে।
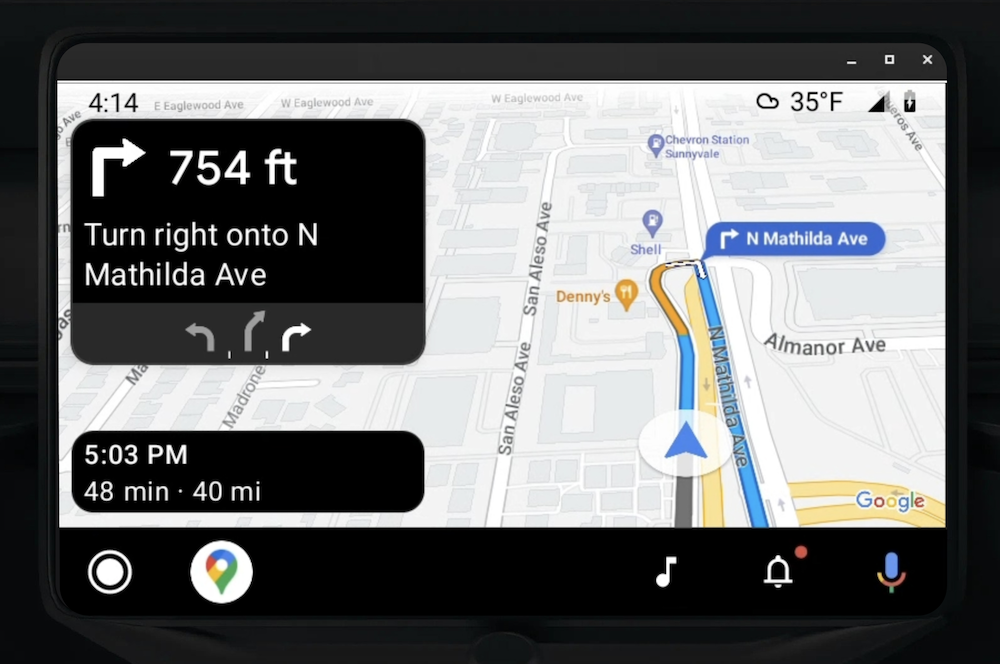
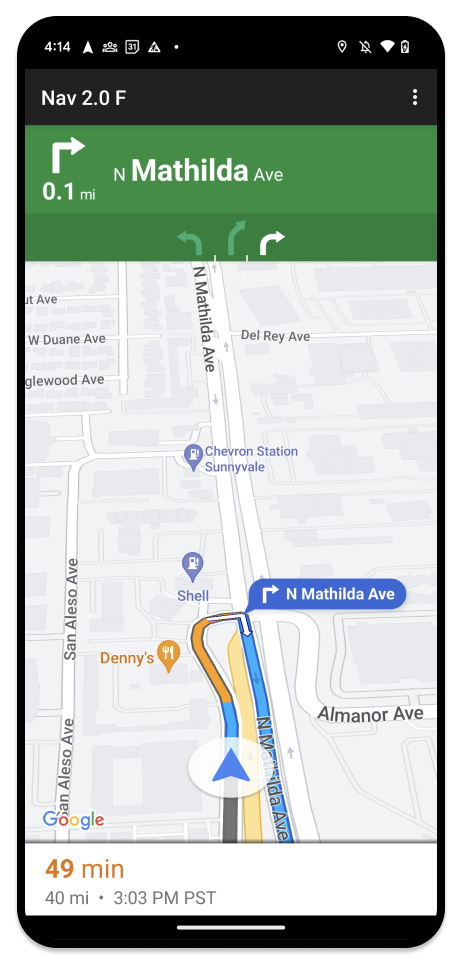
যখন আপনি আপনার নেভিগেশন এসডিকে-চালিত অ্যাপটিকে অ্যান্ড্রয়েড অটোর সাথে কাজ করার জন্য সক্ষম করেন, তখন আপনি নেভিগেশন অভিজ্ঞতার জন্য একটি অতিরিক্ত ভিউ প্রদান করেন। এর ফলে দুটি ম্যাপ ভিউ দেখা যায়—একটি ফোনের জন্য এবং অন্যটি হেড ইউনিটের জন্য। উভয় ডিসপ্লেই Navigator.java থেকে নির্দেশনা গ্রহণ করে, যা একটি সিঙ্গেলটন।
ড্যাশবোর্ড সিস্টেমটি নিরাপত্তা-অনুমোদিত ইন্টারেক্টিভ উপাদানগুলো প্রদর্শন করে, যাতে ব্যবহারকারী অপ্রয়োজনীয় বিভ্রান্তি ছাড়াই নিরাপদে তার গন্তব্যে পৌঁছাতে পারেন। ব্যবহারকারী আপনার অ্যাপের নির্দিষ্ট কার্যকারিতাগুলোও ব্যবহার করতে পারেন, যেমন অর্ডার গ্রহণ বা প্রত্যাখ্যান করা, অথবা মানচিত্রে গ্রাহকের অবস্থান দেখা। অর্ডারের স্ট্যাটাস আপডেটগুলোও ড্যাশবোর্ড ইউনিটে দেখা যেতে পারে।
সংযুক্ত ফোনটি স্ট্যান্ডার্ড নেভিগেশন এসডিকে অভিজ্ঞতা অথবা আপনার অ্যাপ্লিকেশনের অন্য যেকোনো ভিউ বা ওয়ার্কফ্লো প্রদর্শন করা চালিয়ে যেতে পারে । এই ফিচারটি আপনাকে এমন কাস্টম কার্যকারিতা প্রদান করা চালিয়ে যেতে দেয়, যা গাড়ির স্ক্রিনে ভালোভাবে কাজ নাও করতে পারে।
সেট আপ
আপনার অ্যাপকে অ্যান্ড্রয়েড অটোর সাথে কাজ করানোর প্রথম ধাপে, অ্যান্ড্রয়েড অটো দিয়ে একটি গাড়ি পরিষেবা সেট আপ করতে হবে এবং তারপরে আপনার নেভিগেশন SDK অ্যাপে TurnByTurn লাইব্রেরিটি সক্রিয় করতে হবে।
অ্যান্ড্রয়েড অটো দিয়ে শুরু করুন
অ্যান্ড্রয়েড অটোর সাথে কাজ করার জন্য ডিজাইন করা নেভিগেশন এসডিকে ফিচারগুলো নিয়ে কাজ শুরু করার আগে, আপনাকে অবশ্যই আপনার অ্যাপের জন্য একটি কার সার্ভিস সেট আপ করতে হবে, যাতে অ্যান্ড্রয়েড অটো সেটিকে খুঁজে পেতে পারে।
এই ধাপগুলো অনুসরণ করুন, যার সবগুলোই Android for Cars ডেভেলপারদের ডকুমেন্টেশনে পাওয়া যাবে:
- অ্যান্ড্রয়েড অটোর মৌলিক বৈশিষ্ট্যগুলোর সাথে পরিচিত হন ।
- অ্যান্ড্রয়েড ফর কারস অ্যাপ লাইব্রেরি ইনস্টল করুন ।
- আপনার অ্যাপের ম্যানিফেস্ট ফাইলটি অ্যান্ড্রয়েড অটো অন্তর্ভুক্ত করার জন্য কনফিগার করুন ।
- আপনার ম্যানিফেস্টে গাড়ির অ্যাপের সর্বনিম্ন স্তর ১ ঘোষণা করুন ।
- আপনার
CarAppServiceএবং সেশন তৈরি করুন ।
নেভিগেশন এসডিকে সেট আপ করুন
একবার আপনার গাড়ির অ্যাপ পরিষেবাটি চালু হয়ে গেলে, আপনি নেভিগেশন এসডিকে (SDK) নিয়ে কাজ করার জন্য প্রস্তুত।
- আপনার অ্যাপে যদি আগে থেকেই নেভিগেশন এসডিকে (Navigation SDK) যুক্ত না করে থাকেন, তাহলে আপনার প্রজেক্টটি সেট আপ করুন ।
- আপনার অ্যাপের জন্য টার্ন-বাই-টার্ন গাইডেন্স ফিড সক্রিয় করুন ।
- ঐচ্ছিক। নেভিগেশন এসডিকে থেকে তৈরি আইকনগুলো ব্যবহার করুন ।
-
Screenক্লাসে প্রদত্ত Android Auto Surface-এNavigationViewForAutoক্লাস ব্যবহার করে মানচিত্রটি আঁকুন । - TurnbyTurn লাইব্রেরি থেকে ডেটা নিয়ে অ্যান্ড্রয়েড অটো নেভিগেশন টেমপ্লেটটি পূরণ করুন ।
এখন যেহেতু আপনার অ্যাপে নেভিগেশন তথ্য দেওয়ার জন্য একটি নিবন্ধিত পরিষেবা রয়েছে এবং আপনার অ্যাপটি অ্যান্ড্রয়েড অটো-র সাথে সংযোগ করতে পারে, তাই অ্যান্ড্রয়েড অটো-র সাথে আপনার অ্যাপটি সঠিকভাবে কাজ করার জন্য প্রয়োজনীয় বাকি নেভিগেশন উপাদানগুলো তৈরি করতে আপনি প্রস্তুত:
- মানচিত্র এবং নেভিগেশন UI আঁকুন
- মানচিত্রের সাথে মিথস্ক্রিয়া সক্ষম করুন
- নেভিগেশন নির্দেশাবলী প্রদর্শন করুন
- সঠিক কৌশলের ধরণ নিশ্চিত করুন
মানচিত্র এবং নেভিগেশন UI আঁকুন
NavigationViewForAuto ক্লাসটি অ্যান্ড্রয়েড অটো স্ক্রিনে একটি মানচিত্র এবং নেভিগেশন UI রেন্ডার করে। এটি ফোনের NavigationView এর মতোই অনেক কার্যকারিতা প্রদান করে, তবে এর ইন্টারঅ্যাক্টিভিটি সীমিত। অ্যান্ড্রয়েড অটো দ্বারা প্রদত্ত সারফেসে অঙ্কন করার জন্য NavigationViewForAuto ব্যবহার করুন:
private boolean isSurfaceReady(SurfaceContainer surfaceContainer) {
return surfaceContainer.getSurface() != null
&& surfaceContainer.getDpi() != 0
&& surfaceContainer.getHeight() != 0
&& surfaceContainer.getWidth() != 0;
}
@Override
public void onSurfaceAvailable(@NonNull SurfaceContainer surfaceContainer) {
if (!isSurfaceReady(surfaceContainer)) {
return;
}
virtualDisplay =
getCarContext()
.getSystemService(DisplayManager.class)
.createVirtualDisplay(
VIRTUAL_DISPLAY_NAME,
surfaceContainer.getWidth(),
surfaceContainer.getHeight(),
surfaceContainer.getDpi(),
surfaceContainer.getSurface(),
DisplayManager.VIRTUAL_DISPLAY_FLAG_OWN_CONTENT_ONLY);
presentation = new Presentation(getCarContext(), virtualDisplay.getDisplay());
navigationView = new NavigationViewForAuto(getCarContext());
navigationView.onCreate(null);
navigationView.onStart();
navigationView.onResume();
presentation.setContentView(navigationView);
presentation.show();
navigationView.getMapAsync(googleMap -> this.googleMap = googleMap);
}
@Override
public void onSurfaceDestroyed(@NonNull SurfaceContainer surfaceContainer) {
navigationView.onPause();
navigationView.onStop();
navigationView.onDestroy();
presentation.dismiss();
virtualDisplay.release();
}
মানচিত্রের সাথে মিথস্ক্রিয়া সক্ষম করুন
ড্রাইভারের সুরক্ষার জন্য, অ্যান্ড্রয়েড অটো স্ক্রিন সারফেস ইন্টারঅ্যাকশনকে কয়েকটি SurfaceCallback মেথডের মধ্যে সীমাবদ্ধ রাখে। ইন-ড্যাশ স্ক্রিনে ম্যাপের সাথে ড্রাইভারের সীমিত ইন্টারঅ্যাকশন সমর্থন করার জন্য এই কলব্যাকগুলো ব্যবহার করুন। উদাহরণস্বরূপ, onClick এবং onScale ব্যবহারকারীর ট্যাপ এবং পিঞ্চ জেসচারের সাথে সম্পর্কিত। ইন্টারঅ্যাকটিভিটি কলব্যাকগুলোতে অবশ্যই ম্যাপ অ্যাকশন স্ট্রিপটি নিম্নরূপভাবে ব্যবহার করতে হবে:
ম্যাপের ইন্টারঅ্যাক্টিভিটি কলব্যাক পেতে হলে, আপনার অ্যাপে অবশ্যই একটি Action.PAN বাটন ব্যবহার করতে হবে।
অতিরিক্ত ব্যবহারকারী কার্যক্রম সমর্থন করার জন্য, ম্যাপ অ্যাকশন স্ট্রিপে বাটন যোগ করুন।
সারফেস কলব্যাক সক্রিয় করুন
@NonNull
@Override
public Template onGetTemplate() {
return new NavigationTemplate.Builder()
.setActionStrip(new ActionStrip.Builder().build())
.setMapActionStrip(new ActionStrip.Builder().addAction(Action.PAN).build())
.build();
}
পিঞ্চ করে জুম করুন
@Override
public void onScale(float focusX, float focusY, float scaleFactor) {
CameraUpdate update =
CameraUpdateFactory.zoomBy((scaleFactor - 1),
new Point((int) focusX, (int) focusY));
googleMap.animateCamera(update); // map is set in onSurfaceAvailable.
}
প্যানিং
@Override
public void onScroll(float distanceX, float distanceY) {
googleMap.moveCamera(CameraUpdateFactory.scrollBy(distanceX, distanceY));
}
নেভিগেশন নির্দেশাবলী প্রদর্শন করুন
এই অংশে নেভিগেশন পোস্টের জন্য কীভাবে একজন অবজারভার সেট আপ করতে হয় এবং টার্ন কার্ড টেমপ্লেটে নেভিগেশন দিকনির্দেশনা কীভাবে পূরণ করতে হয়, তা আলোচনা করা হয়েছে।
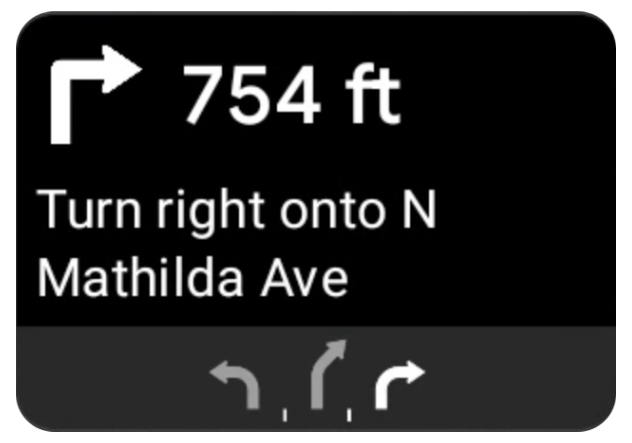
অ্যান্ড্রয়েড অটো নেভিগেশন টেমপ্লেটে একটি টার্ন কার্ড থাকে, যা বর্তমান ট্রিপ সম্পর্কিত নেভিগেশন তথ্য প্রদর্শন করে। নেভিগেশন এসডিকে-তে থাকা TurnByTurn লাইব্রেরি এই নেভিগেশন তথ্য সরবরাহ করে, যা আপনার কোড অ্যান্ড্রয়েড অটো নেভিগেশন টেমপ্লেটটি পূরণ করতে ব্যবহার করে।
একজন পর্যবেক্ষক নিযুক্ত করুন
নিম্নলিখিত উদাহরণে, SampleApplication হলো একটি কাস্টম অ্যাপ্লিকেশন ক্লাস যা একটি MutableLiveData<NavInfo> অবজেক্ট রক্ষণাবেক্ষণ করে। যখন অবজারভার নেভিগেটর অবজেক্ট থেকে কোনো আপডেট পায়, তখন এটি এই NavInfo অবজেক্টটিকে SampleApplication ক্লাস দ্বারা রক্ষণাবেক্ষণ করা NavInfoMutableLiveData তে পোস্ট করে।
নিম্নলিখিত উদাহরণটি তার অ্যান্ড্রয়েড অটো স্ক্রিন বাস্তবায়নে এই অবজেক্টটির জন্য একটি অবজারভার নিবন্ধন করে।
public SampleAndroidAutoNavigationScreen(@NonNull CarContext carContext,
SampleApplication application) {
super(carContext);
getCarContext().getCarService(AppManager.class).setSurfaceCallback(this);
application.getNavInfoMutableLiveData().observe(this, this::processNextStep);
}
নেভিগেশন তথ্য পূরণ করুন
নিম্নলিখিত কোড স্নিপেটটি দেখায় কিভাবে পদক্ষেপ, দূরত্ব এবং আইকন সহ বর্তমান রাউটিং তথ্য দিয়ে অ্যান্ড্রয়েড অটো টেমপ্লেটটি পূরণ করতে হয়। আপনি "ফিড ডিসপ্লে পূরণ করুন" অংশে এই ডিসপ্লে উপাদানগুলি সম্পর্কে আরও পড়তে পারেন।
কোডের উদাহরণটি দেখতে প্রসারিত করুন।
private RoutingInfo currentRoutingInfo; @NonNull @Override public Template onGetTemplate() { NavigationTemplate.Builder navigationTemplateBuilder = new NavigationTemplate.Builder() .setActionStrip(...) .setMapActionStrip(...) if (currentRoutingInfo != null) { navigationTemplateBuilder.setNavigationInfo(currentRoutingInfo); } return navigationTemplateBuilder.build(); } private void processNextStep(NavInfo navInfo) { if (navInfo == null || navinfo.getCurrentStep() == null) { return; } /** * Converts data received from the Navigation data feed * into Android-Auto compatible data structures. For more information * see the "Ensure correct maneuver types" below. */ Step currentStep = buildStepFromStepInfo(navInfo.getCurrentStep()); Distance distanceToStep = buildDistanceFromMeters(navInfo.getDistanceToCurrentStepMeters()); currentRoutingInfo = new RoutingInfo.Builder().setCurrentStep(currentStep, distanceToStep).build(); // Invalidate the current template which leads to another onGetTemplate call. invalidate(); } private Step buildStepFromStepInfo(StepInfo stepInfo) { IconCompat maneuverIcon = IconCompat.createWithBitmap(stepInfo.getManeuverBitmap()); Maneuver.Builder maneuverBuilder = newManeuver.Builder( ManeuverConverter .getAndroidAutoManeuverType(stepInfo.getManeuver())); CarIcon maneuverCarIcon = new CarIcon.Builder(maneuverIcon).build(); maneuverBuilder.setIcon(maneuverCarIcon); Step.Builder stepBuilder = new Step.Builder() .setRoad(stepInfo.getFullRoadName()) .setCue(stepInfo.getFullInstructionText()) .setManeuver(maneuverBuilder.build()); if (stepInfo.getLanes() != null && stepInfo.getLanesBitmap() != null) { for (Lane lane : buildAndroidAutoLanesFromStep(stepInfo)) { stepBuilder.addLane(lane); } IconCompat lanesIcon = IconCompat.createWithBitmap(stepInfo.getLanesBitmap()); CarIcon lanesImage = new CarIcon.Builder(lanesIcon).build(); stepBuilder.setLanesImage(lanesImage); } return stepBuilder.build(); } /* * Constructs a {@code Distance} object in imperial measurement units. * In a real world scenario, units would be based on locale. */ private Distance buildDistanceFromMeters(int distanceMeters) { // Distance can be negative so set the min distance to 0. int remainingFeet = (int) max(0, distanceMeters * DistanceConstants.FEET_PER_METER); double remainingMiles = ((double) remainingFeet) / DistanceConstants.FEET_PER_MILE; // Only use the tenths place digit if distance is less than 10 miles and show // feet if distance is less than 0.25 miles. if (remainingMiles >= DistanceConstants.MIN_MILES_TO_SHOW_INTEGER) { return Distance.create((int) round(remainingMiles), Distance.UNIT_MILES); } else if (remainingMiles >= 0.25) { return Distance.create((int) remainingMiles, Distance.UNIT_MILES); } else { return Distance.create(remainingFeet, Distance.UNIT_FEET); } }
সঠিক কৌশলের ধরণ যাচাই করুন
অ্যান্ড্রয়েড অটো কার লাইব্রেরিতে ব্যবহৃত ম্যানুভারগুলো টার্নবাইটার্ন লাইব্রেরির ম্যানুভারগুলোর সাথে হুবহু মিলে যায়। তবে, আপনাকে নেভিগেশন এসডিকে-এর ম্যানুভারগুলোকে অ্যান্ড্রয়েড অটো কার লাইব্রেরির একটি বৈধ ডিক্লারেশনে রূপান্তর করতে হবে। নিচের সারণিতে কয়েকটি ফিল্ডের সামঞ্জস্য দেখানো হয়েছে এবং আপনার সুবিধার জন্য এর পরে একটি নমুনা কনভার্টার ইউটিলিটি দেওয়া হলো।
| পালাক্রমে লাইব্রেরি কৌশল | অ্যান্ড্রয়েড অটো ম্যানুভার |
|---|---|
DEPART | TYPE_DEPART |
DESTINATION | TYPE_DESTINATION |
DESTINATION_LEFT | TYPE_DESTINATION_LEFT |
DESTINATION_RIGHT | TYPE_DESTINATION_RIGHT |
TURN_U_TURN_CLOCKWISE | TYPE_U_TURN_RIGHT |
ON_RAMP_LEFT | TYPE_ON_RAMP_NORMAL_LEFT |
ON_RAMP_RIGHT | TYPE_ON_RAMP_NORMAL_RIGHT |
ON_RAMP_SLIGHT_LEFT | TYPE_ON_RAMP_SLIGHT_LEFT |
FORK_RIGHT | TYPE_FORK_RIGHT |
কোডের উদাহরণটি দেখতে প্রসারিত করুন।
import com.google.android.libraries.mapsplatform.turnbyturn.model.Maneuver; import com.google.common.collect.ImmutableMap; import javax.annotation.Nullable; /** Converter that converts between turn-by-turn and Android Auto Maneuvers. */ public final class ManeuverConverter { private ManeuverConverter() {} // Map from turn-by-turn Maneuver to Android Auto Maneuver.Type. private static final ImmutableMap<Integer, Integer> MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE = ImmutableMap.<Integer, Integer>builder() .put(Maneuver.DEPART, androidx.car.app.navigation.model.Maneuver.TYPE_DEPART) .put(Maneuver.DESTINATION, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION) .put( Maneuver.DESTINATION_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_LEFT) .put( Maneuver.DESTINATION_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_RIGHT) .put(Maneuver.STRAIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_STRAIGHT) .put(Maneuver.TURN_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_LEFT) .put( Maneuver.TURN_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_RIGHT) .put(Maneuver.TURN_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_LEFT) .put(Maneuver.TURN_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_RIGHT) .put( Maneuver.TURN_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_LEFT) .put( Maneuver.TURN_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_RIGHT) .put( Maneuver.TURN_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SHARP_LEFT) .put( Maneuver.TURN_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.TURN_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_RIGHT) .put( Maneuver.TURN_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_LEFT) .put( Maneuver.MERGE_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_SIDE_UNSPECIFIED) .put(Maneuver.MERGE_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_LEFT) .put(Maneuver.MERGE_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_RIGHT) .put(Maneuver.FORK_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_LEFT) .put(Maneuver.FORK_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_RIGHT) .put( Maneuver.ON_RAMP_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_LEFT) .put( Maneuver.ON_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_RIGHT) .put( Maneuver.ON_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_LEFT) .put( Maneuver.ON_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_LEFT) .put( Maneuver.OFF_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.OFF_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.ROUNDABOUT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW) .put( Maneuver.ROUNDABOUT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW) .put( Maneuver.ROUNDABOUT_STRAIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CW) .put( Maneuver.ROUNDABOUT_STRAIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CCW) .put( Maneuver.ROUNDABOUT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_EXIT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CW) .put( Maneuver.ROUNDABOUT_EXIT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CCW) .put(Maneuver.FERRY_BOAT, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_BOAT) .put(Maneuver.FERRY_TRAIN, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_TRAIN) .put(Maneuver.NAME_CHANGE, androidx.car.app.navigation.model.Maneuver.TYPE_NAME_CHANGE) .buildOrThrow(); /** Represents the roundabout turn angle for a slight turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SLIGHT = 10; /** Represents the roundabout turn angle for a normal turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_NORMAL = 45; /** Represents the roundabout turn angle for a sharp turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SHARP = 135; /** Represents the roundabout turn angle for a u-turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_U_TURN = 180; /** * Returns the corresponding {@link androidx.car.app.navigation.model.Maneuver.Type} for the given * direction {@link Maneuver} * * @throws {@link IllegalArgumentException} if the given maneuver does not have a corresponding * Android Auto Maneuver type. */ public static int getAndroidAutoManeuverType(@Maneuver int maneuver) { if (MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.containsKey(maneuver)) { return MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.get(maneuver); } throw new IllegalArgumentException( String.format( "Given turn-by-turn Maneuver %d cannot be converted to an Android Auto equivalent.", maneuver)); } /** * Returns the corresponding Android Auto roundabout angle for the given turn {@link Maneuver}. * Returns {@code null} if given maneuver does not involve a roundabout with a turn. */ @Nullable public static Integer getAndroidAutoRoundaboutAngle(@Maneuver int maneuver) { if (maneuver == Maneuver.ROUNDABOUT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_NORMAL; } if (maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SHARP; } if (maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SLIGHT; } if (maneuver == Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_U_TURN; } return null; } }
সম্পর্কিত নথিপত্র
- ধাপে ধাপে দিকনির্দেশনা ফিড সক্রিয় করুন : প্রথমে ধাপে ধাপে কার্যকারিতা যুক্ত করুন, যাতে আপনার অ্যাপটি অ্যান্ড্রয়েড অটোর সাথে কাজ করতে পারে।
- ফিড ডিসপ্লে পূরণ করুন : নির্দেশনামূলক তথ্যের জন্য ডেটা ফিল্ডগুলো অ্যাক্সেস করুন এবং আইকন ব্যবহার করুন।