
این بخش نحوه استفاده از کیت توسعه نرمافزار ناوبری (Navigation SDK) به همراه کتابخانه برنامه اندروید برای خودروها (Android for Cars App) را برای نمایش تجربه ناوبری برنامه شما روی نمایشگرهای داخل داشبورد شرح میدهد. اگر سیستم داخل داشبورد کاربر از اندروید اتو (Android Auto) پشتیبانی کند، کاربران میتوانند با اتصال تلفن خود به نمایشگر، مستقیماً از برنامه شما روی نمایشگر خودرو خود استفاده کنند. راهنمای صوتی نیز روی بلندگوهای خودرو اجرا میشود.
کتابخانه اپلیکیشن اندروید برای خودروها (Android for Cars App Library) با ارائه مجموعهای از قالبهای بصری مورد تایید برای ایمنی راننده، امکان اجرای اپلیکیشنهای اندروید را بر روی اندروید اتو فراهم میکند. این قالبها به طور هدفمند کنترلهای رابط کاربری درون داشبورد را از کنترلهای تلفن همراه جدا میکنند تا حواسپرتی راننده کاهش یابد.
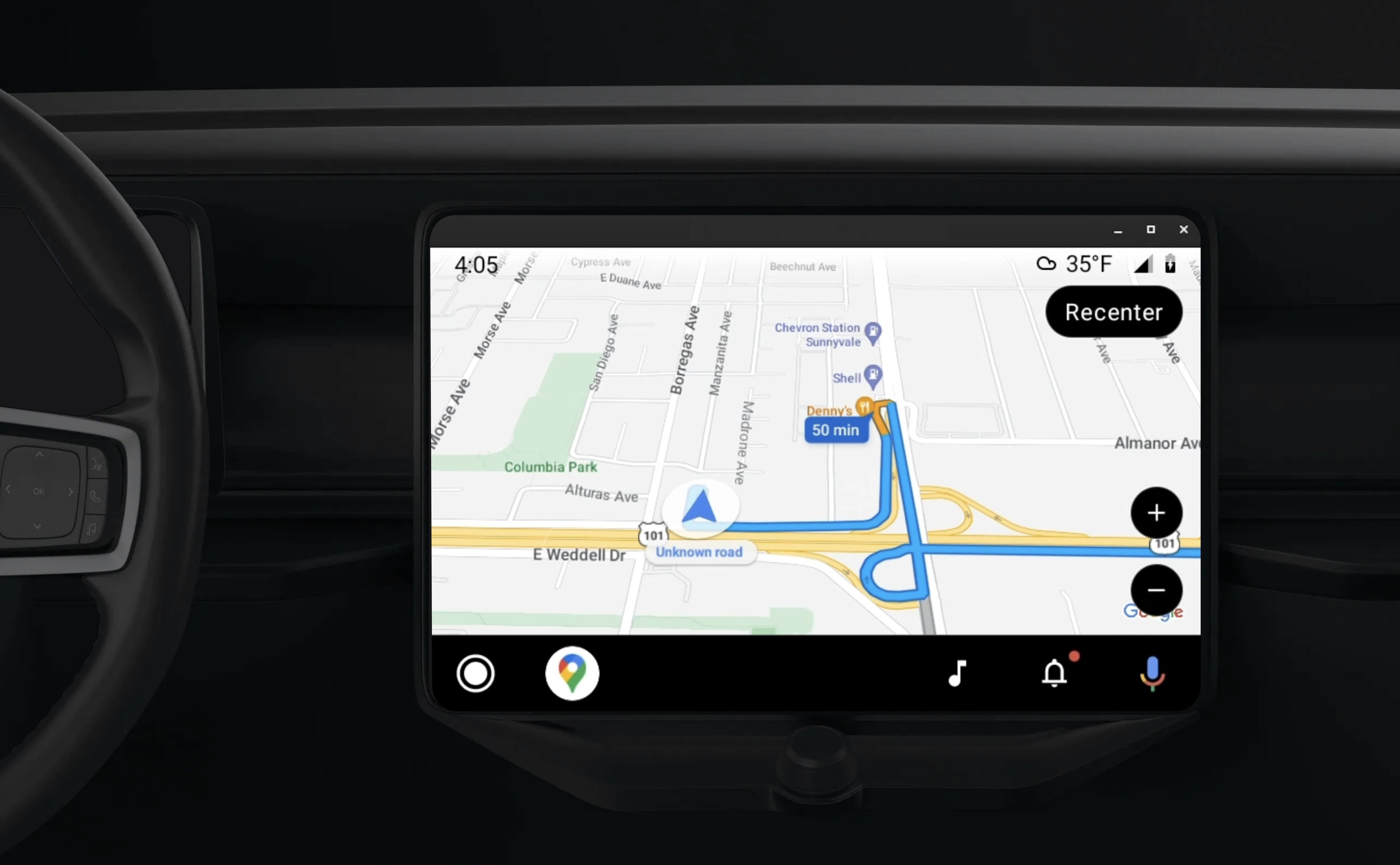
وقتی برنامهی مبتنی بر SDK ناوبری خود را برای کار با Android Auto فعال میکنید، یک نمای اضافی برای تجربهی ناوبری ارائه میدهید. این امکان دو نمای نقشه را فراهم میکند - یکی برای تلفن و دیگری برای دستگاه پخش خودرو. هر دو نمایشگر از Navigator.java که یک فایل تکصفحهای است، راهنمایی دریافت میکنند.
سیستم درون داشبورد، عناصر تعاملی تأیید شده از نظر ایمنی را نمایش میدهد تا کاربر بتواند با خیال راحت و بدون حواسپرتی بیمورد به مقصد خود برسد. کاربر همچنین میتواند با قابلیتهای خاص برنامه شما، مانند پذیرش یا رد سفارشات یا مشاهده موقعیت مکانی مشتری روی نقشه، تعامل داشته باشد. بهروزرسانیهای وضعیت سفارش نیز میتوانند در واحد درون داشبورد نمایش داده شوند.
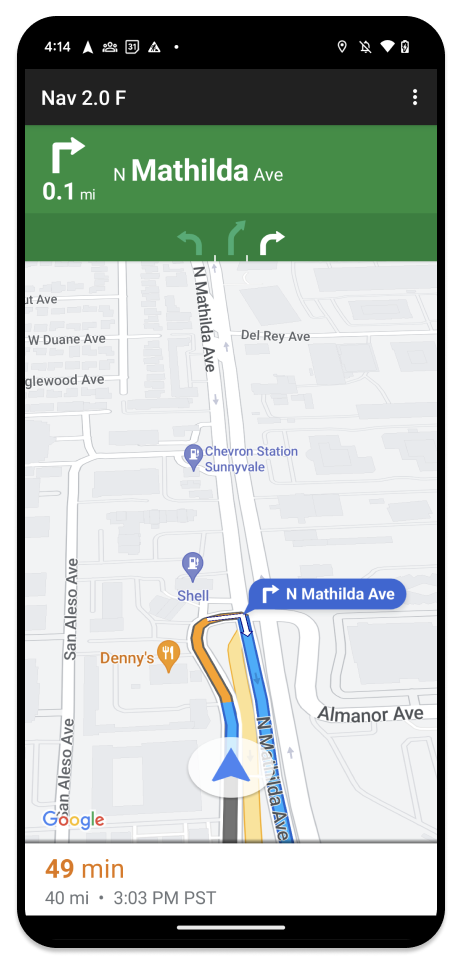
گوشی متصل میتواند به نمایش تجربه استاندارد Navigation SDK یا هر نمای یا گردش کار دیگری در برنامه شما ادامه دهد . این ویژگی به شما امکان میدهد تا به ارائه قابلیتهای سفارشی که ممکن است در صفحه نمایش خودرو به خوبی کار نکند، ادامه دهید.
تنظیم کنید
اولین بخش از کار کردن برنامه شما با Android Auto شامل راهاندازی یک سرویس خودرو با Android Auto و سپس فعال کردن کتابخانه TurnByTurn در برنامه Navigation SDK شما است.
با اندروید اتو شروع کنید
قبل از شروع کار با ویژگیهای Navigation SDK که برای کار با Android Auto طراحی شدهاند، باید یک سرویس خودرو برای برنامه خود تنظیم کنید تا Android Auto بتواند آن را کشف کند.
این مراحل را دنبال کنید، که همه آنها را میتوانید در مستندات توسعهدهندگان Android for Cars بیابید:
- با ویژگیهای اساسی اندروید اتو آشنا شوید.
- کتابخانه برنامه اندروید برای ماشین را نصب کنید .
- فایل مانیفست برنامه خود را طوری پیکربندی کنید که Android Auto را شامل شود.
- حداقل سطح برنامهی ماشین (car-app) را در مانیفست خود ۱ اعلام کنید .
-
CarAppServiceو session خود را ایجاد کنید .
راهاندازی SDK ناوبری
پس از اینکه سرویس اپلیکیشن خودرو خود را راهاندازی کردید، آمادهی کار با کیت توسعهی نرمافزاری ناوبری (Navigation SDK) هستید.
- اگر هنوز Navigation SDK را در برنامه خود ادغام نکردهاید، پروژه خود را راهاندازی کنید .
- فید راهنمای TurnbyTurn را برای برنامه خود فعال کنید .
- اختیاری. از آیکونهای تولید شده از کیت توسعه نرمافزار ناوبری (Navigation SDK) استفاده کنید .
- نقشه را با استفاده از کلاس
NavigationViewForAutoروی Android Auto Surface که در کلاسScreenارائه شده است، رسم کنید. - الگوی ناوبری خودکار اندروید را با دادههای کتابخانه TurnbyTurn پر کنید .
اکنون که یک سرویس ثبتشده برای ارائه اطلاعات ناوبری به برنامه خود دارید و برنامه شما میتواند به Android Auto متصل شود، آمادهاید تا بقیه عناصر ناوبری لازم برای عملکرد صحیح برنامه خود با Android Auto را ایجاد کنید:
رسم نقشه و رابط کاربری ناوبری
کلاس NavigationViewForAuto یک رابط کاربری نقشه و ناوبری را در صفحات Android Auto رندر میکند. این کلاس بسیاری از عملکردهای مشابه NavigationView برای تلفنها را ارائه میدهد، اما با تعامل محدودتر. از NavigationViewForAuto برای ترسیم روی Surface ارائه شده توسط Android Auto استفاده کنید:
private boolean isSurfaceReady(SurfaceContainer surfaceContainer) {
return surfaceContainer.getSurface() != null
&& surfaceContainer.getDpi() != 0
&& surfaceContainer.getHeight() != 0
&& surfaceContainer.getWidth() != 0;
}
@Override
public void onSurfaceAvailable(@NonNull SurfaceContainer surfaceContainer) {
if (!isSurfaceReady(surfaceContainer)) {
return;
}
virtualDisplay =
getCarContext()
.getSystemService(DisplayManager.class)
.createVirtualDisplay(
VIRTUAL_DISPLAY_NAME,
surfaceContainer.getWidth(),
surfaceContainer.getHeight(),
surfaceContainer.getDpi(),
surfaceContainer.getSurface(),
DisplayManager.VIRTUAL_DISPLAY_FLAG_OWN_CONTENT_ONLY);
presentation = new Presentation(getCarContext(), virtualDisplay.getDisplay());
navigationView = new NavigationViewForAuto(getCarContext());
navigationView.onCreate(null);
navigationView.onStart();
navigationView.onResume();
presentation.setContentView(navigationView);
presentation.show();
navigationView.getMapAsync(googleMap -> this.googleMap = googleMap);
}
@Override
public void onSurfaceDestroyed(@NonNull SurfaceContainer surfaceContainer) {
navigationView.onPause();
navigationView.onStop();
navigationView.onDestroy();
presentation.dismiss();
virtualDisplay.release();
}
فعال کردن تعامل نقشه
برای ایمنی راننده، اندروید اتو تعامل با سطح صفحه نمایش را به مجموعهای از متدهای SurfaceCallback محدود میکند. از این فراخوانیها برای پشتیبانی از تعامل محدود راننده با نقشه روی صفحه نمایش داخل داشبورد استفاده کنید. به عنوان مثال، onClick و onScale مربوط به حرکات ضربه زدن و نیشگون گرفتن از طرف کاربر هستند. فراخوانیهای تعاملی باید از نوار اکشن نقشه به شرح زیر استفاده کنند:
برای دریافت فراخوانیهای تعاملی نقشه، برنامه شما باید از یک دکمه Action.PAN استفاده کند.
برای پشتیبانی از اقدامات اضافی کاربر، دکمههایی را به نوار اقدام نقشه اضافه کنید.
فعال کردن فراخوانیهای سطحی
@NonNull
@Override
public Template onGetTemplate() {
return new NavigationTemplate.Builder()
.setActionStrip(new ActionStrip.Builder().build())
.setMapActionStrip(new ActionStrip.Builder().addAction(Action.PAN).build())
.build();
}
بزرگنمایی با نیشگون گرفتن
@Override
public void onScale(float focusX, float focusY, float scaleFactor) {
CameraUpdate update =
CameraUpdateFactory.zoomBy((scaleFactor - 1),
new Point((int) focusX, (int) focusY));
googleMap.animateCamera(update); // map is set in onSurfaceAvailable.
}
پنینگ
@Override
public void onScroll(float distanceX, float distanceY) {
googleMap.moveCamera(CameraUpdateFactory.scrollBy(distanceX, distanceY));
}
نمایش مسیرهای ناوبری
این بخش نحوه تنظیم ناظر برای پستهای ناوبری و پر کردن مسیرهای ناوبری در الگوی کارت نوبت را پوشش میدهد.
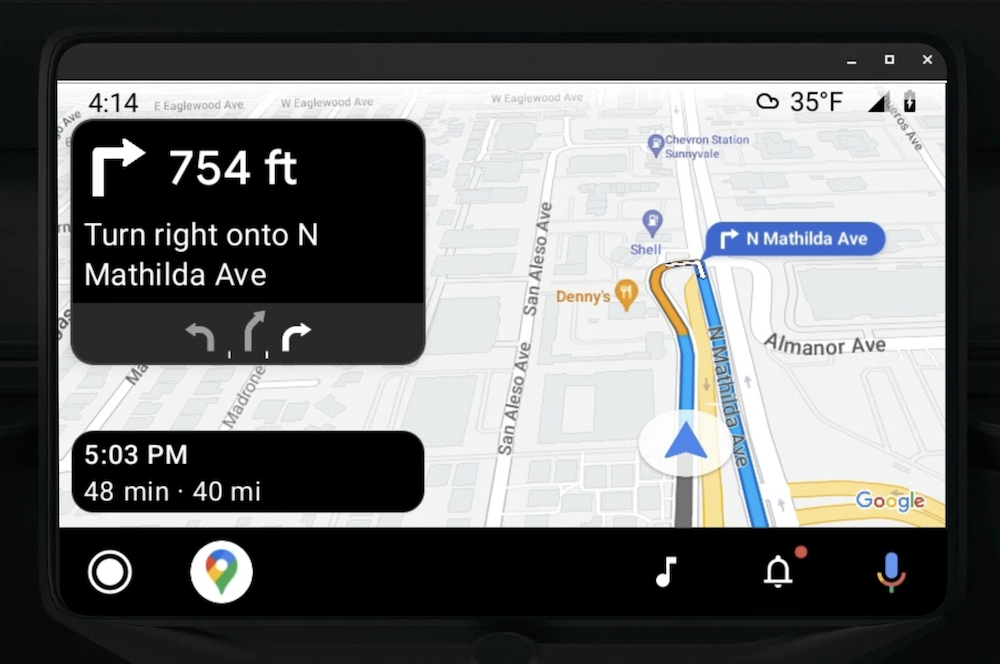
الگوی ناوبری اندروید اتو (Android Auto Navigation Template) یک کارت نوبتدهی ارائه میدهد که اطلاعات ناوبری مربوط به سفر فعلی را نمایش میدهد. کتابخانه TurnByTurn در Navigation SDK این اطلاعات ناوبری را ارائه میدهد که کد شما از آن برای پر کردن الگوی ناوبری اندروید اتو استفاده میکند.
یک ناظر تنظیم کنید
در مثال زیر، SampleApplication یک کلاس برنامه سفارشی است که یک شیء MutableLiveData<NavInfo> را نگهداری میکند. هنگامی که ناظر (observer) بهروزرسانیای را از شیء navigator دریافت میکند، این شیء NavInfo را به NavInfoMutableLiveData که توسط کلاس SampleApplication نگهداری میشود، ارسال میکند.
مثال زیر یک ناظر برای این شیء در پیادهسازی Android Auto Screen ثبت میکند.
public SampleAndroidAutoNavigationScreen(@NonNull CarContext carContext,
SampleApplication application) {
super(carContext);
getCarContext().getCarService(AppManager.class).setSurfaceCallback(this);
application.getNavInfoMutableLiveData().observe(this, this::processNextStep);
}
اطلاعات ناوبری را پر کنید
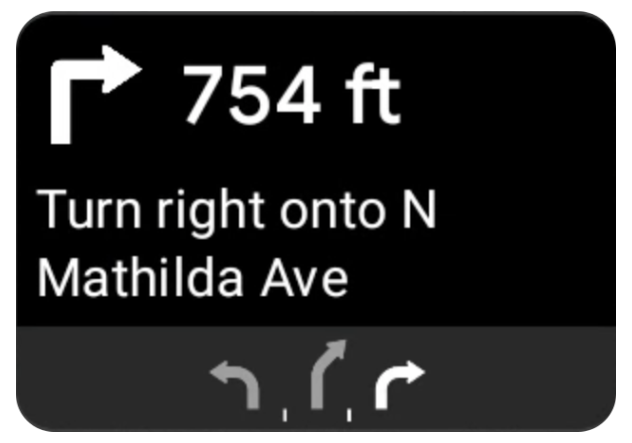
قطعه کد زیر نحوه پر کردن قالب Android Auto با اطلاعات مسیریابی فعلی، شامل گامها، مسافتها و آیکونها را نشان میدهد. میتوانید اطلاعات بیشتر در مورد این عناصر نمایشی را در بخش «پر کردن صفحه نمایش فید» مطالعه کنید.
برای دیدن نمونه کد، صفحه را باز کنید.
private RoutingInfo currentRoutingInfo; @NonNull @Override public Template onGetTemplate() { NavigationTemplate.Builder navigationTemplateBuilder = new NavigationTemplate.Builder() .setActionStrip(...) .setMapActionStrip(...) if (currentRoutingInfo != null) { navigationTemplateBuilder.setNavigationInfo(currentRoutingInfo); } return navigationTemplateBuilder.build(); } private void processNextStep(NavInfo navInfo) { if (navInfo == null || navinfo.getCurrentStep() == null) { return; } /** * Converts data received from the Navigation data feed * into Android-Auto compatible data structures. For more information * see the "Ensure correct maneuver types" below. */ Step currentStep = buildStepFromStepInfo(navInfo.getCurrentStep()); Distance distanceToStep = buildDistanceFromMeters(navInfo.getDistanceToCurrentStepMeters()); currentRoutingInfo = new RoutingInfo.Builder().setCurrentStep(currentStep, distanceToStep).build(); // Invalidate the current template which leads to another onGetTemplate call. invalidate(); } private Step buildStepFromStepInfo(StepInfo stepInfo) { IconCompat maneuverIcon = IconCompat.createWithBitmap(stepInfo.getManeuverBitmap()); Maneuver.Builder maneuverBuilder = newManeuver.Builder( ManeuverConverter .getAndroidAutoManeuverType(stepInfo.getManeuver())); CarIcon maneuverCarIcon = new CarIcon.Builder(maneuverIcon).build(); maneuverBuilder.setIcon(maneuverCarIcon); Step.Builder stepBuilder = new Step.Builder() .setRoad(stepInfo.getFullRoadName()) .setCue(stepInfo.getFullInstructionText()) .setManeuver(maneuverBuilder.build()); if (stepInfo.getLanes() != null && stepInfo.getLanesBitmap() != null) { for (Lane lane : buildAndroidAutoLanesFromStep(stepInfo)) { stepBuilder.addLane(lane); } IconCompat lanesIcon = IconCompat.createWithBitmap(stepInfo.getLanesBitmap()); CarIcon lanesImage = new CarIcon.Builder(lanesIcon).build(); stepBuilder.setLanesImage(lanesImage); } return stepBuilder.build(); } /* * Constructs a {@code Distance} object in imperial measurement units. * In a real world scenario, units would be based on locale. */ private Distance buildDistanceFromMeters(int distanceMeters) { // Distance can be negative so set the min distance to 0. int remainingFeet = (int) max(0, distanceMeters * DistanceConstants.FEET_PER_METER); double remainingMiles = ((double) remainingFeet) / DistanceConstants.FEET_PER_MILE; // Only use the tenths place digit if distance is less than 10 miles and show // feet if distance is less than 0.25 miles. if (remainingMiles >= DistanceConstants.MIN_MILES_TO_SHOW_INTEGER) { return Distance.create((int) round(remainingMiles), Distance.UNIT_MILES); } else if (remainingMiles >= 0.25) { return Distance.create((int) remainingMiles, Distance.UNIT_MILES); } else { return Distance.create(remainingFeet, Distance.UNIT_FEET); } }
انواع مانور صحیح را تأیید کنید
انواع مانورهای مورد استفاده در کتابخانه Android Auto Car به صورت یک به یک با مانورهای ارائه شده توسط کتابخانه TurnByTurn مطابقت دارند. با این حال، شما باید مانورهای Navigation SDK را به یک اعلان معتبر در کتابخانه Android Auto Car تبدیل کنید. جدول زیر تطابق تعدادی از فیلدها را نشان میدهد و به دنبال آن یک ابزار مبدل نمونه برای راحتی شما ارائه شده است.
| مانور کتابخانه نوبت به نوبت | مانور خودکار اندروید |
|---|---|
DEPART | TYPE_DEPART |
DESTINATION | TYPE_DESTINATION |
DESTINATION_LEFT | TYPE_DESTINATION_LEFT |
DESTINATION_RIGHT | TYPE_DESTINATION_RIGHT |
TURN_U_TURN_CLOCKWISE | TYPE_U_TURN_RIGHT |
ON_RAMP_LEFT | TYPE_ON_RAMP_NORMAL_LEFT |
ON_RAMP_RIGHT | TYPE_ON_RAMP_NORMAL_RIGHT |
ON_RAMP_SLIGHT_LEFT | TYPE_ON_RAMP_SLIGHT_LEFT |
FORK_RIGHT | TYPE_FORK_RIGHT |
برای دیدن نمونه کد، صفحه را باز کنید.
import com.google.android.libraries.mapsplatform.turnbyturn.model.Maneuver; import com.google.common.collect.ImmutableMap; import javax.annotation.Nullable; /** Converter that converts between turn-by-turn and Android Auto Maneuvers. */ public final class ManeuverConverter { private ManeuverConverter() {} // Map from turn-by-turn Maneuver to Android Auto Maneuver.Type. private static final ImmutableMap<Integer, Integer> MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE = ImmutableMap.<Integer, Integer>builder() .put(Maneuver.DEPART, androidx.car.app.navigation.model.Maneuver.TYPE_DEPART) .put(Maneuver.DESTINATION, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION) .put( Maneuver.DESTINATION_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_LEFT) .put( Maneuver.DESTINATION_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_RIGHT) .put(Maneuver.STRAIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_STRAIGHT) .put(Maneuver.TURN_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_LEFT) .put( Maneuver.TURN_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_RIGHT) .put(Maneuver.TURN_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_LEFT) .put(Maneuver.TURN_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_RIGHT) .put( Maneuver.TURN_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_LEFT) .put( Maneuver.TURN_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_RIGHT) .put( Maneuver.TURN_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SHARP_LEFT) .put( Maneuver.TURN_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.TURN_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_RIGHT) .put( Maneuver.TURN_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_LEFT) .put( Maneuver.MERGE_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_SIDE_UNSPECIFIED) .put(Maneuver.MERGE_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_LEFT) .put(Maneuver.MERGE_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_RIGHT) .put(Maneuver.FORK_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_LEFT) .put(Maneuver.FORK_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_RIGHT) .put( Maneuver.ON_RAMP_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_LEFT) .put( Maneuver.ON_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_RIGHT) .put( Maneuver.ON_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_LEFT) .put( Maneuver.ON_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_LEFT) .put( Maneuver.OFF_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.OFF_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.ROUNDABOUT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW) .put( Maneuver.ROUNDABOUT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW) .put( Maneuver.ROUNDABOUT_STRAIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CW) .put( Maneuver.ROUNDABOUT_STRAIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CCW) .put( Maneuver.ROUNDABOUT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_EXIT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CW) .put( Maneuver.ROUNDABOUT_EXIT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CCW) .put(Maneuver.FERRY_BOAT, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_BOAT) .put(Maneuver.FERRY_TRAIN, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_TRAIN) .put(Maneuver.NAME_CHANGE, androidx.car.app.navigation.model.Maneuver.TYPE_NAME_CHANGE) .buildOrThrow(); /** Represents the roundabout turn angle for a slight turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SLIGHT = 10; /** Represents the roundabout turn angle for a normal turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_NORMAL = 45; /** Represents the roundabout turn angle for a sharp turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SHARP = 135; /** Represents the roundabout turn angle for a u-turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_U_TURN = 180; /** * Returns the corresponding {@link androidx.car.app.navigation.model.Maneuver.Type} for the given * direction {@link Maneuver} * * @throws {@link IllegalArgumentException} if the given maneuver does not have a corresponding * Android Auto Maneuver type. */ public static int getAndroidAutoManeuverType(@Maneuver int maneuver) { if (MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.containsKey(maneuver)) { return MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.get(maneuver); } throw new IllegalArgumentException( String.format( "Given turn-by-turn Maneuver %d cannot be converted to an Android Auto equivalent.", maneuver)); } /** * Returns the corresponding Android Auto roundabout angle for the given turn {@link Maneuver}. * Returns {@code null} if given maneuver does not involve a roundabout with a turn. */ @Nullable public static Integer getAndroidAutoRoundaboutAngle(@Maneuver int maneuver) { if (maneuver == Maneuver.ROUNDABOUT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_NORMAL; } if (maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SHARP; } if (maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SLIGHT; } if (maneuver == Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_U_TURN; } return null; } }
مستندات مرتبط
- فعال کردن فید راهنمای گام به گام : ابتدا قابلیت راهنمای گام به گام را ادغام کنید تا برنامه شما بتواند با Android Auto کار کند.
- نمایش فید را پر کنید : برای اطلاعات راهنما به فیلدهای داده دسترسی پیدا کنید و از آیکونها استفاده کنید.