Page Summary
-
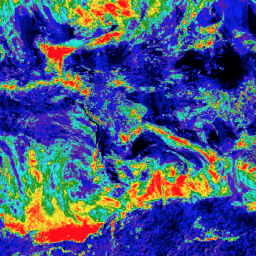
This dataset offers offline high-resolution imagery focusing on cloud parameters.
-
The cloud property retrieval uses the OCRA and ROCINN algorithms, which measure cloud fraction, height, and optical thickness.
-
Data is available from July 2018 to October 2025 with a 2-day revisit interval.
-
Sentinel-5 Precursor, launched by ESA, monitors air pollution with the Tropomi sensor.
-
The offline (OFFL) data is processed into Level 3 products suitable for use in Earth Engine.
- Dataset Availability
- 2018-07-04T11:34:21Z–2026-07-25T16:07:04Z
- Dataset Producer
- European Union/ESA/Copernicus
- Revisit Interval
- 2 Days
- Tags
Description
OFFL/L3_CLOUD
This dataset provides offline high-resolution imagery of cloud parameters.
The TROPOMI/S5P cloud properties retrieval is based on the OCRA and ROCINN algorithms currently being used in the operational GOME and GOME-2 products. OCRA retrieves the cloud fraction using measurements in the UV/VIS spectral regions and ROCINN retrieves the cloud height (pressure) and optical thickness (albedo) using measurements in and around the oxygen A-band at 760 nm. Version 3.0 of the algorithms are used, which are based on a more realistic treatment of clouds as optically uniform layers of light-scattering particles. Additionally, the cloud parameters are also provided for a cloud model which assumes the cloud to be a Lambertian reflecting boundary. More information.
OFFL L3 Product
To make our OFFL L3 products, we find which areas within the product's bounding box contain data by using a command like this:
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time})'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
grid_info.h5
We then merge all the data into one large mosaic (area-averaging values for pixels that may have different values for different times). From the mosaic, we create a set of tiles containing orthorectified raster data.
Example harpconvert invocation for one tile:
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time});
bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01);
keep(cloud_fraction,cloud_top_pressure,cloud_top_height,
cloud_base_pressure,cloud_base_height,cloud_optical_depth,surface_albedo,
sensor_azimuth_angle,sensor_zenith_angle,solar_azimuth_angle,
solar_zenith_angle)'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
output.h5
Sentinel-5 Precursor
Sentinel-5 Precursor is a satellite launched on 13 October 2017 by the European Space Agency to monitor air pollution. The onboard sensor is frequently referred to as Tropomi (TROPOspheric Monitoring Instrument).
All of the S5P datasets, except CH4, have two versions: Near Real-Time (NRTI) and Offline (OFFL). CH4 is available as OFFL only. The NRTI assets cover a smaller area than the OFFL assets, but appear more quickly after acquisition. The OFFL assets contain data from a single orbit (which, due to half the earth being dark, contains data only for a single hemisphere).
Because of noise in the data, negative vertical column values are often observed in particular over clean regions or for low SO2 emissions. It is recommended not to filter these values except for outliers, i.e. for vertical columns lower than -0.001 mol/m^2.
The original Sentinel 5P Level 2 (L2) data is binned by time, not by latitude/longitude. To make it possible to ingest the data into Earth Engine, each Sentinel 5P L2 product is converted to L3, keeping a single grid per orbit (that is, no aggregation across products is performed).
Source products spanning the antimeridian are ingested as two Earth Engine assets, with suffixes _1 and _2.
The conversion to L3 is done by the harpconvert
tool using the bin_spatial operation. The source data is filtered to
remove pixels with QA values less than:
- 80% for AER_AI
- 75% for the tropospheric_NO2_column_number_density band of NO2
- 50% for all other datasets except for O3 and SO2
The O3_TCL product is ingested directly (without running harpconvert).
Bands
Bands
Pixel size: 1113.2 meters (all bands)
| Name | Units | Min | Max | Pixel Size | Description |
|---|---|---|---|---|---|
cloud_fraction |
Fraction | 0* | 1* | 1113.2 meters | Retrieved effective radiometric cloud fraction |
cloud_top_pressure |
Pa | 12110* | 101299* | 1113.2 meters | Retrieved atmospheric pressure at the level of cloud top |
cloud_top_height |
m | 9* | 15455* | 1113.2 meters | Retrieved altitude of the cloud top |
cloud_base_pressure |
Pa | 14170* | 101299* | 1113.2 meters | Cloud base pressure |
cloud_base_height |
m | 9* | 14540* | 1113.2 meters | Cloud base height |
cloud_optical_depth |
1* | 250* | 1113.2 meters | Retrieved cloud optical depth |
|
surface_albedo |
3.95845e-11* | 1* | 1113.2 meters | Surface albedo |
|
sensor_azimuth_angle |
deg | -180* | 180* | 1113.2 meters | Azimuth angle of the satellite at the ground pixel location (WGS84); angle measured East-of-North. |
sensor_zenith_angle |
deg | 0.09* | 66.44* | 1113.2 meters | Zenith angle of the satellite at the ground pixel location (WGS84); angle measured away from the vertical. |
solar_azimuth_angle |
deg | -180* | 180* | 1113.2 meters | Azimuth angle of the Sun at the ground pixel location (WGS84); angle measured East-of-North. |
solar_zenith_angle |
deg | 8* | 80* | 1113.2 meters | Zenith angle of the satellite at the ground pixel location (WGS84); angle measured away from the vertical. |
Image Properties
Image Properties
| Name | Type | Description |
|---|---|---|
| ALGORITHM_VERSION | STRING | The algorithm version used in L2 processing. It is separate from the processor (framework) version, to accommodate different release schedules for different products. |
| BUILD_DATE | STRING | The date, expressed as milliseconds since 1 Jan 1970, when the software used to perform L2 processing was built. |
| HARP_VERSION | INT | The version of the HARP tool used to grid the L2 data into an L3 product. |
| INSTITUTION | STRING | The institution where data processing from L1 to L2 was performed. |
| L3_PROCESSING_TIME | INT | The date, expressed as milliseconds since 1 Jan 1970, when Google processed the L2 data into L3 using harpconvert. |
| LAT_MAX | DOUBLE | The maximum latitude of the asset (degrees). |
| LAT_MIN | DOUBLE | The minimum latitude of the asset (degrees). |
| LON_MAX | DOUBLE | The maximum longitude of the asset (degrees). |
| LON_MIN | DOUBLE | The minimum longitude of the asset (degrees). |
| ORBIT | INT | The orbit number of the satellite when the data was acquired. |
| PLATFORM | STRING | Name of the platform which acquired the data. |
| PROCESSING_STATUS | STRING | The processing status of the product on a global level, mainly based on the availability of auxiliary input data. Possible values are "Nominal" and "Degraded". |
| PROCESSOR_VERSION | STRING | The version of the software used for L2 processing, as a string of the form "major.minor.patch". |
| PRODUCT_ID | STRING | Id of the L2 product used to generate this asset. |
| PRODUCT_QUALITY | STRING | Indicator that specifies whether the product quality is degraded or not. Allowed values are "Degraded" and "Nominal". |
| SENSOR | STRING | Name of the sensor which acquired the data. |
| SPATIAL_RESOLUTION | STRING | Spatial resolution at nadir. For most products this is |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | Days from 1 Jan 1950 to when the data was acquired. |
| TIME_REFERENCE_JULIAN_DAY | DOUBLE | The Julian day number when the data was acquired. |
| TRACKING_ID | STRING | UUID for the L2 product file. |
| CLOUD_MODE | STRING | Tells which model was used to generate this dataset, the CAL (Clouds As Layers) model or the CRB (Clouds as Reflecting Boundaries) model. Valid values of this property are "cal" or "crb", respectively, with "cal" being the default. |
| STATUS_MET_2D | STRING | This dataset uses some dynamic auxiliary data from the European Centre for Medium-Range Weather Forecasts. If the ECMWF data was used, this field will have the value 'Nominal'. If the ECMWF data was not used, a fallback solution was used, and this field will have the value of "Fallback". |
Terms of Use
Terms of Use
The use of Sentinel data is governed by the Copernicus Sentinel Data Terms and Conditions.
Explore with Earth Engine
Code Editor (JavaScript)
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_CLOUD') .select('cloud_fraction') .filterDate('2019-06-01', '2019-06-02'); var band_viz = { min: 0, max: 0.95, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P Cloud'); Map.setCenter(-58.14, -10.47, 2);