
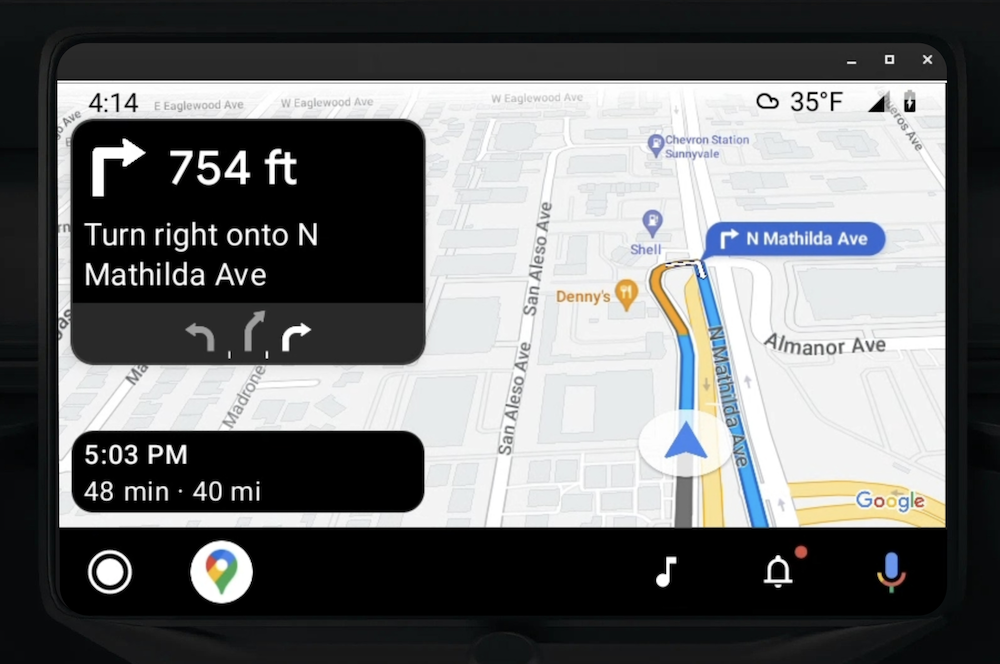
本部分介绍了如何将 Navigation SDK 与 Android for Cars 应用库搭配使用,以便在车载信息娱乐系统上显示应用的导航体验。如果用户的仪表盘系统支持 Android Auto,用户只需将手机连接到该系统,即可直接在汽车显示屏上使用您的应用。语音导航也会通过汽车的扬声器播放。

Android for Cars 应用库提供了一组经批准可确保驾驶员安全的视觉模板,使 Android 应用能够在 Android Auto 上运行。这些模板有意限制了信息中心内的界面控件,使其与手机的界面控件不同,以减少驾驶员分心。
当您启用由 Navigation SDK 提供支持的应用以与 Android Auto 搭配使用时,您将为导航体验提供额外的视图。这样一来,您就可以获得两个地图视图,一个用于手机,另一个用于车机。两个显示屏都会从 Navigator.java(一个单例)接收指导。
车载信息中心系统会显示安全批准的互动元素,以便用户安全地前往目的地,而不会受到不必要的干扰。用户还可以与您的应用专用功能互动,例如接受或拒绝订单,或在地图上查看客户的位置。订单状态更新也可以显示在信息中心内的单元中。
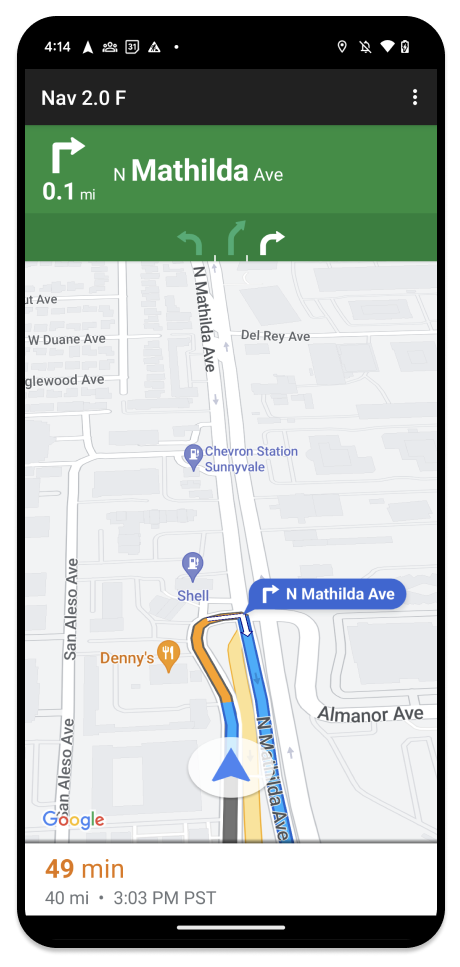
所连接的手机可以继续显示标准 Navigation SDK 体验或应用中的任何其他视图或工作流。借助此功能,您可以继续提供在车载屏幕上可能无法正常运行的自定义功能。
设置
要让应用与 Android Auto 搭配使用,首先需要设置一个包含 Android Auto 的汽车服务,然后在 Navigation SDK 应用中启用 TurnByTurn 库。
从 Android Auto 开始
在开始使用旨在与 Android Auto 搭配使用的 Navigation SDK 功能之前,您必须为应用设置汽车服务,以便 Android Auto 可以发现该服务。
请按照以下步骤操作,所有步骤都可以在 Android for Cars 开发者文档中找到:
- 熟悉 Android Auto 的基本功能。
- 安装 Android for Cars 应用库。
- 配置应用的清单文件,以包含 Android Auto。
- 在清单中声明最低汽车应用级别为 1。
- 创建
CarAppService和会话。
设置 Navigation SDK
建立汽车应用服务后,您就可以开始使用 Navigation SDK 了。
- 如果您尚未将 Navigation SDK 集成到应用中,请设置项目。
- 为您的应用启用 TurnbyTurn 指南 Feed。
- 可选。使用 Navigation SDK 中的生成的图标。
- 使用
Screen类中提供的 Android Auto Surface 上的NavigationViewForAuto类绘制地图。 - 使用 TurnbyTurn 库中的数据填充 Android Auto 导航模板。
现在,您已注册一项服务,用于向应用提供导航信息,并且您的应用可以连接到 Android Auto,接下来,您就可以创建其余的导航元素,以便您的应用能够与 Android Auto 正常搭配使用:
绘制地图和导航界面
NavigationViewForAuto 类可在 Android Auto 屏幕上呈现地图和导航界面。它提供的大部分功能与手机版 NavigationView 相同,但互动性有限。使用 NavigationViewForAuto 在 Android Auto 提供的 Surface 上绘制内容:
private boolean isSurfaceReady(SurfaceContainer surfaceContainer) {
return surfaceContainer.getSurface() != null
&& surfaceContainer.getDpi() != 0
&& surfaceContainer.getHeight() != 0
&& surfaceContainer.getWidth() != 0;
}
@Override
public void onSurfaceAvailable(@NonNull SurfaceContainer surfaceContainer) {
if (!isSurfaceReady(surfaceContainer)) {
return;
}
virtualDisplay =
getCarContext()
.getSystemService(DisplayManager.class)
.createVirtualDisplay(
VIRTUAL_DISPLAY_NAME,
surfaceContainer.getWidth(),
surfaceContainer.getHeight(),
surfaceContainer.getDpi(),
surfaceContainer.getSurface(),
DisplayManager.VIRTUAL_DISPLAY_FLAG_OWN_CONTENT_ONLY);
presentation = new Presentation(getCarContext(), virtualDisplay.getDisplay());
navigationView = new NavigationViewForAuto(getCarContext());
navigationView.onCreate(null);
navigationView.onStart();
navigationView.onResume();
presentation.setContentView(navigationView);
presentation.show();
navigationView.getMapAsync(googleMap -> this.googleMap = googleMap);
}
@Override
public void onSurfaceDestroyed(@NonNull SurfaceContainer surfaceContainer) {
navigationView.onPause();
navigationView.onStop();
navigationView.onDestroy();
presentation.dismiss();
virtualDisplay.release();
}
启用地图互动
为了驾驶员的安全,Android Auto 将屏幕 Surface 互动限制为一系列 SurfaceCallback 方法。使用这些回调可在车载屏幕上支持有限的驾驶员与地图互动。例如,onClick 和 onScale 分别对应于用户的点按和捏合手势。互动回调必须使用 map action strip,如下所示:
如需接收地图互动回调,您的应用必须使用 Action.PAN 按钮。
如需支持其他用户操作,请向地图操作栏添加按钮。
启用 Surface 回调
@NonNull
@Override
public Template onGetTemplate() {
return new NavigationTemplate.Builder()
.setActionStrip(new ActionStrip.Builder().build())
.setMapActionStrip(new ActionStrip.Builder().addAction(Action.PAN).build())
.build();
}
通过双指张合手势进行缩放
@Override
public void onScale(float focusX, float focusY, float scaleFactor) {
CameraUpdate update =
CameraUpdateFactory.zoomBy((scaleFactor - 1),
new Point((int) focusX, (int) focusY));
googleMap.animateCamera(update); // map is set in onSurfaceAvailable.
}
平移
@Override
public void onScroll(float distanceX, float distanceY) {
googleMap.moveCamera(CameraUpdateFactory.scrollBy(distanceX, distanceY));
}
显示导航路线
本部分介绍如何为导航帖子设置观测器,以及如何在转向卡片模板中填充导航方向。
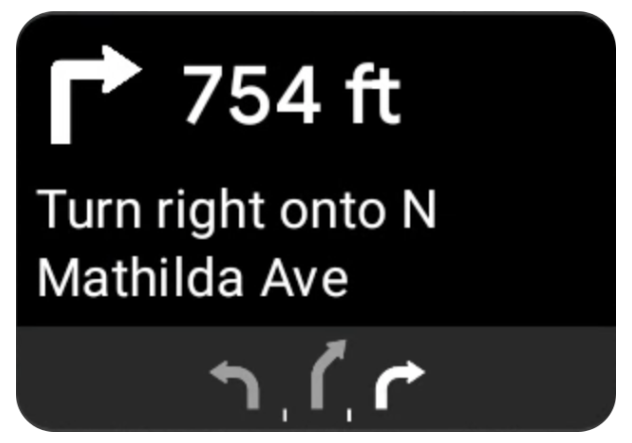
Android Auto 导航模板提供了一个转向卡片,用于显示与当前行程相关的导航信息。Navigation SDK 中的 TurnByTurn 库提供此导航信息,您的代码会使用该信息填充 Android Auto 导航模板。
设置观察者
在以下示例中,SampleApplication 是一个维护 MutableLiveData<NavInfo> 对象的自定义应用类。当观察者从导航器对象收到更新时,会将此 NavInfo 对象发布到 SampleApplication 类维护的 NavInfoMutableLiveData。
以下示例在 Android Auto Screen 的实现中为此对象注册了一个观测器。
public SampleAndroidAutoNavigationScreen(@NonNull CarContext carContext,
SampleApplication application) {
super(carContext);
getCarContext().getCarService(AppManager.class).setSurfaceCallback(this);
application.getNavInfoMutableLiveData().observe(this, this::processNextStep);
}
填充导航信息
以下代码段展示了如何使用当前路线信息(包括步骤、距离和图标)填充 Android Auto 模板。如需详细了解这些展示元素,请参阅填充 Feed 展示。
展开即可查看代码示例。
private RoutingInfo currentRoutingInfo; @NonNull @Override public Template onGetTemplate() { NavigationTemplate.Builder navigationTemplateBuilder = new NavigationTemplate.Builder() .setActionStrip(...) .setMapActionStrip(...) if (currentRoutingInfo != null) { navigationTemplateBuilder.setNavigationInfo(currentRoutingInfo); } return navigationTemplateBuilder.build(); } private void processNextStep(NavInfo navInfo) { if (navInfo == null || navinfo.getCurrentStep() == null) { return; } /** * Converts data received from the Navigation data feed * into Android-Auto compatible data structures. For more information * see the "Ensure correct maneuver types" below. */ Step currentStep = buildStepFromStepInfo(navInfo.getCurrentStep()); Distance distanceToStep = buildDistanceFromMeters(navInfo.getDistanceToCurrentStepMeters()); currentRoutingInfo = new RoutingInfo.Builder().setCurrentStep(currentStep, distanceToStep).build(); // Invalidate the current template which leads to another onGetTemplate call. invalidate(); } private Step buildStepFromStepInfo(StepInfo stepInfo) { IconCompat maneuverIcon = IconCompat.createWithBitmap(stepInfo.getManeuverBitmap()); Maneuver.Builder maneuverBuilder = newManeuver.Builder( ManeuverConverter .getAndroidAutoManeuverType(stepInfo.getManeuver())); CarIcon maneuverCarIcon = new CarIcon.Builder(maneuverIcon).build(); maneuverBuilder.setIcon(maneuverCarIcon); Step.Builder stepBuilder = new Step.Builder() .setRoad(stepInfo.getFullRoadName()) .setCue(stepInfo.getFullInstructionText()) .setManeuver(maneuverBuilder.build()); if (stepInfo.getLanes() != null && stepInfo.getLanesBitmap() != null) { for (Lane lane : buildAndroidAutoLanesFromStep(stepInfo)) { stepBuilder.addLane(lane); } IconCompat lanesIcon = IconCompat.createWithBitmap(stepInfo.getLanesBitmap()); CarIcon lanesImage = new CarIcon.Builder(lanesIcon).build(); stepBuilder.setLanesImage(lanesImage); } return stepBuilder.build(); } /* * Constructs a {@code Distance} object in imperial measurement units. * In a real world scenario, units would be based on locale. */ private Distance buildDistanceFromMeters(int distanceMeters) { // Distance can be negative so set the min distance to 0. int remainingFeet = (int) max(0, distanceMeters * DistanceConstants.FEET_PER_METER); double remainingMiles = ((double) remainingFeet) / DistanceConstants.FEET_PER_MILE; // Only use the tenths place digit if distance is less than 10 miles and show // feet if distance is less than 0.25 miles. if (remainingMiles >= DistanceConstants.MIN_MILES_TO_SHOW_INTEGER) { return Distance.create((int) round(remainingMiles), Distance.UNIT_MILES); } else if (remainingMiles >= 0.25) { return Distance.create((int) remainingMiles, Distance.UNIT_MILES); } else { return Distance.create(remainingFeet, Distance.UNIT_FEET); } }
验证机动类型是否正确
Android Auto Car 库中使用的各种机动动作与 TurnByTurn 库提供的机动动作一一对应。不过,您必须将 Navigation SDK 动作转换为 Android Auto 汽车库中的有效声明。下表显示了一些字段的对应关系,随后提供了一个示例转换器实用程序,供您参考。
| 精细(导航)库操作 | Android Auto 机动 |
|---|---|
DEPART |
TYPE_DEPART |
DESTINATION |
TYPE_DESTINATION |
DESTINATION_LEFT |
TYPE_DESTINATION_LEFT |
DESTINATION_RIGHT |
TYPE_DESTINATION_RIGHT |
TURN_U_TURN_CLOCKWISE |
TYPE_U_TURN_RIGHT |
ON_RAMP_LEFT |
TYPE_ON_RAMP_NORMAL_LEFT |
ON_RAMP_RIGHT |
TYPE_ON_RAMP_NORMAL_RIGHT |
ON_RAMP_SLIGHT_LEFT |
TYPE_ON_RAMP_SLIGHT_LEFT |
FORK_RIGHT |
TYPE_FORK_RIGHT |
展开即可查看代码示例。
import com.google.android.libraries.mapsplatform.turnbyturn.model.Maneuver; import com.google.common.collect.ImmutableMap; import javax.annotation.Nullable; /** Converter that converts between turn-by-turn and Android Auto Maneuvers. */ public final class ManeuverConverter { private ManeuverConverter() {} // Map from turn-by-turn Maneuver to Android Auto Maneuver.Type. private static final ImmutableMap<Integer, Integer> MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE = ImmutableMap.<Integer, Integer>builder() .put(Maneuver.DEPART, androidx.car.app.navigation.model.Maneuver.TYPE_DEPART) .put(Maneuver.DESTINATION, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION) .put( Maneuver.DESTINATION_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_LEFT) .put( Maneuver.DESTINATION_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_DESTINATION_RIGHT) .put(Maneuver.STRAIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_STRAIGHT) .put(Maneuver.TURN_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_LEFT) .put( Maneuver.TURN_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_NORMAL_RIGHT) .put(Maneuver.TURN_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_LEFT) .put(Maneuver.TURN_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_KEEP_RIGHT) .put( Maneuver.TURN_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_LEFT) .put( Maneuver.TURN_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SLIGHT_RIGHT) .put( Maneuver.TURN_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_TURN_SHARP_LEFT) .put( Maneuver.TURN_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.TURN_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_RIGHT) .put( Maneuver.TURN_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_U_TURN_LEFT) .put( Maneuver.MERGE_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_SIDE_UNSPECIFIED) .put(Maneuver.MERGE_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_LEFT) .put(Maneuver.MERGE_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_MERGE_RIGHT) .put(Maneuver.FORK_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_LEFT) .put(Maneuver.FORK_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_FORK_RIGHT) .put( Maneuver.ON_RAMP_UNSPECIFIED, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_LEFT) .put( Maneuver.ON_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_NORMAL_RIGHT) .put( Maneuver.ON_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_LEFT) .put( Maneuver.ON_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SLIGHT_RIGHT) .put( Maneuver.ON_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_LEFT) .put( Maneuver.ON_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_SHARP_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_RIGHT) .put( Maneuver.ON_RAMP_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ON_RAMP_U_TURN_LEFT) .put( Maneuver.OFF_RAMP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.OFF_RAMP_KEEP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_KEEP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SLIGHT_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_LEFT) .put( Maneuver.OFF_RAMP_SLIGHT_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_SLIGHT_RIGHT) .put( Maneuver.OFF_RAMP_SHARP_LEFT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_LEFT) .put( Maneuver.OFF_RAMP_SHARP_RIGHT, androidx.car.app.navigation.model.Maneuver.TYPE_OFF_RAMP_NORMAL_RIGHT) .put( Maneuver.ROUNDABOUT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW) .put( Maneuver.ROUNDABOUT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW) .put( Maneuver.ROUNDABOUT_STRAIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CW) .put( Maneuver.ROUNDABOUT_STRAIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_ENTER_CCW) .put( Maneuver.ROUNDABOUT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver .TYPE_ROUNDABOUT_ENTER_AND_EXIT_CCW_WITH_ANGLE) .put( Maneuver.ROUNDABOUT_EXIT_CLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CW) .put( Maneuver.ROUNDABOUT_EXIT_COUNTERCLOCKWISE, androidx.car.app.navigation.model.Maneuver.TYPE_ROUNDABOUT_EXIT_CCW) .put(Maneuver.FERRY_BOAT, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_BOAT) .put(Maneuver.FERRY_TRAIN, androidx.car.app.navigation.model.Maneuver.TYPE_FERRY_TRAIN) .put(Maneuver.NAME_CHANGE, androidx.car.app.navigation.model.Maneuver.TYPE_NAME_CHANGE) .buildOrThrow(); /** Represents the roundabout turn angle for a slight turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SLIGHT = 10; /** Represents the roundabout turn angle for a normal turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_NORMAL = 45; /** Represents the roundabout turn angle for a sharp turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_SHARP = 135; /** Represents the roundabout turn angle for a u-turn in either right or left directions. */ private static final int ROUNDABOUT_ANGLE_U_TURN = 180; /** * Returns the corresponding {@link androidx.car.app.navigation.model.Maneuver.Type} for the given * direction {@link Maneuver} * * @throws {@link IllegalArgumentException} if the given maneuver does not have a corresponding * Android Auto Maneuver type. */ public static int getAndroidAutoManeuverType(@Maneuver int maneuver) { if (MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.containsKey(maneuver)) { return MANEUVER_TO_ANDROID_AUTO_MANEUVER_TYPE.get(maneuver); } throw new IllegalArgumentException( String.format( "Given turn-by-turn Maneuver %d cannot be converted to an Android Auto equivalent.", maneuver)); } /** * Returns the corresponding Android Auto roundabout angle for the given turn {@link Maneuver}. * Returns {@code null} if given maneuver does not involve a roundabout with a turn. */ @Nullable public static Integer getAndroidAutoRoundaboutAngle(@Maneuver int maneuver) { if (maneuver == Maneuver.ROUNDABOUT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_NORMAL; } if (maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SHARP_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SHARP; } if (maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_LEFT_COUNTERCLOCKWISE || maneuver == Maneuver.ROUNDABOUT_SLIGHT_RIGHT_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_SLIGHT; } if (maneuver == Maneuver.ROUNDABOUT_U_TURN_CLOCKWISE || maneuver == Maneuver.ROUNDABOUT_U_TURN_COUNTERCLOCKWISE) { return ROUNDABOUT_ANGLE_U_TURN; } return null; } }
相关文档
- 启用精细导航信息流:首先集成精细导航功能,以便您的应用可以与 Android Auto 搭配使用。
- 填充 Feed 显示:访问指导信息的数据字段并使用图标。